3 自抗扰控制技术的MATLAB 仿真自抗扰控制技术是由韩京清教授根据多年实际控制工程经验提出的新的控制理论
在传统的工业和其他控制领域,PID 一直占据主导地位
目前,PID在航空航天、运动控制及其他过程控制领域,仍然占据90%以上的份额
但是,PID 自身还是存在缺陷,而韩京清教授正是出于对P1D 控制算法的充分认知,尤其是对其缺陷的清晰分析,提出了自抗扰控制技术
1 自抗扰控制技术概述自抗扰控制技术的提出是根据对PID 控制技术的充分认知,扬其优点,抑其缺点而提出的
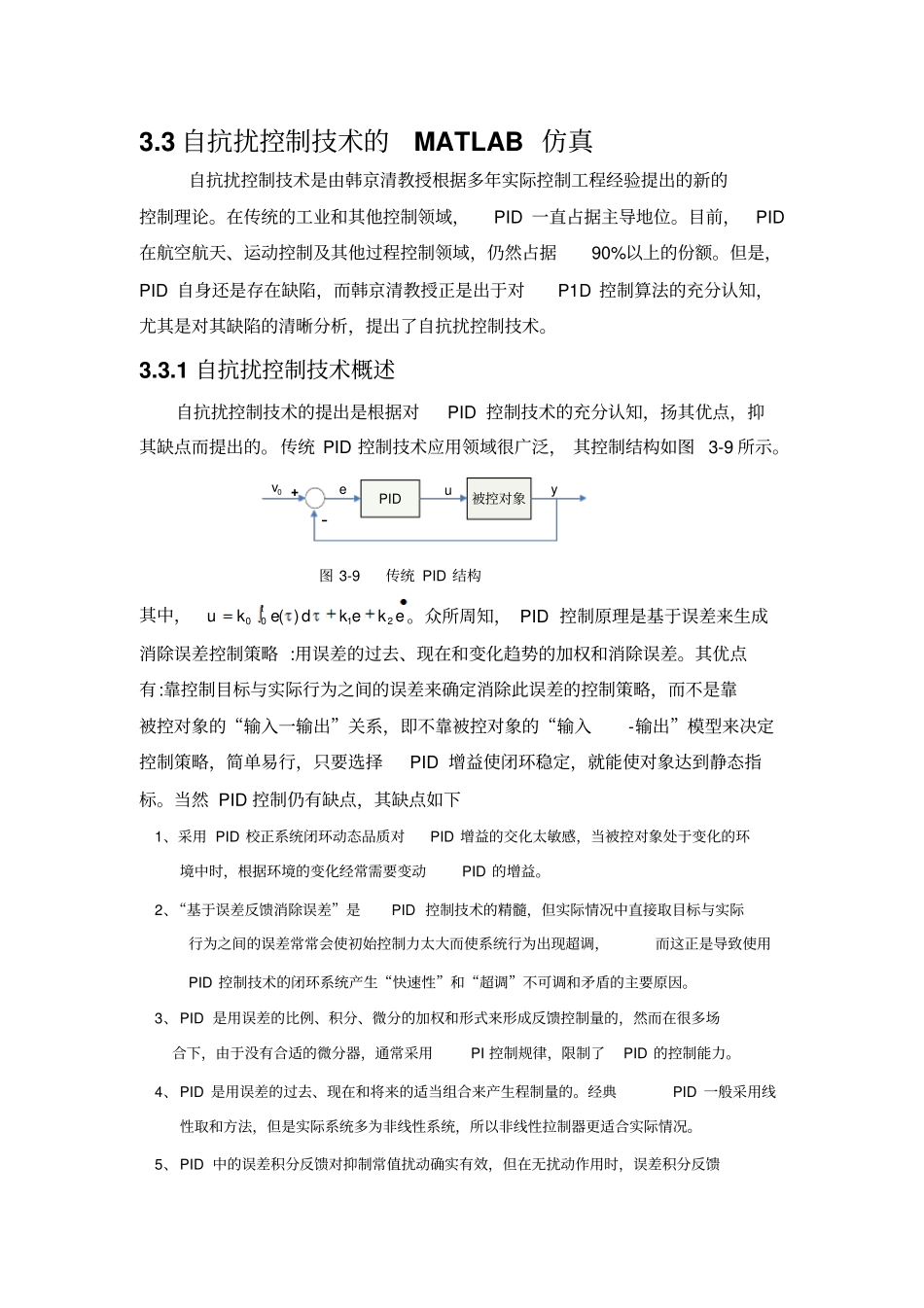
传统 PID 控制技术应用领域很广泛, 其控制结构如图 3-9 所示
PID被控对象ue0vy-+图 3-9 传统 PID 结构其中,ekekdekut2100)(
众所周知, PID 控制原理是基于误差来生成消除误差控制策略 :用误差的过去、现在和变化趋势的加权和消除误差
其优点有:靠控制目标与实际行为之间的误差来确定消除此误差的控制策略,而不是靠被控对象的“输入一输出”关系,即不靠被控对象的“输入-输出”模型来决定控制策略,简单易行,只要选择PID 增益使闭环稳定,就能使对象达到静态指标
当然 PID 控制仍有缺点,其缺点如下1、采用 PID 校正系统闭环动态品质对PID 增益的交化太敏感,当被控对象处于变化的环境中时,根据环境的变化经常需要变动PID 的增益
2、“基于误差反馈消除误差”是PID 控制技术的精髓,但实际情况中直接取目标与实际行为之间的误差常常会使初始控制力太大而使系统行为出现超调,而这正是导致使用PID 控制技术的闭环系统产生“快速性”和“超调”不可调和矛盾的主要原因
3、PID 是用误差的比例、积分、微分的加权和形式来形成反馈控制量的,然而在很多场合下,由于没有合适的微分器,通常采用PI 控制规律,限制了PID 的控制能力
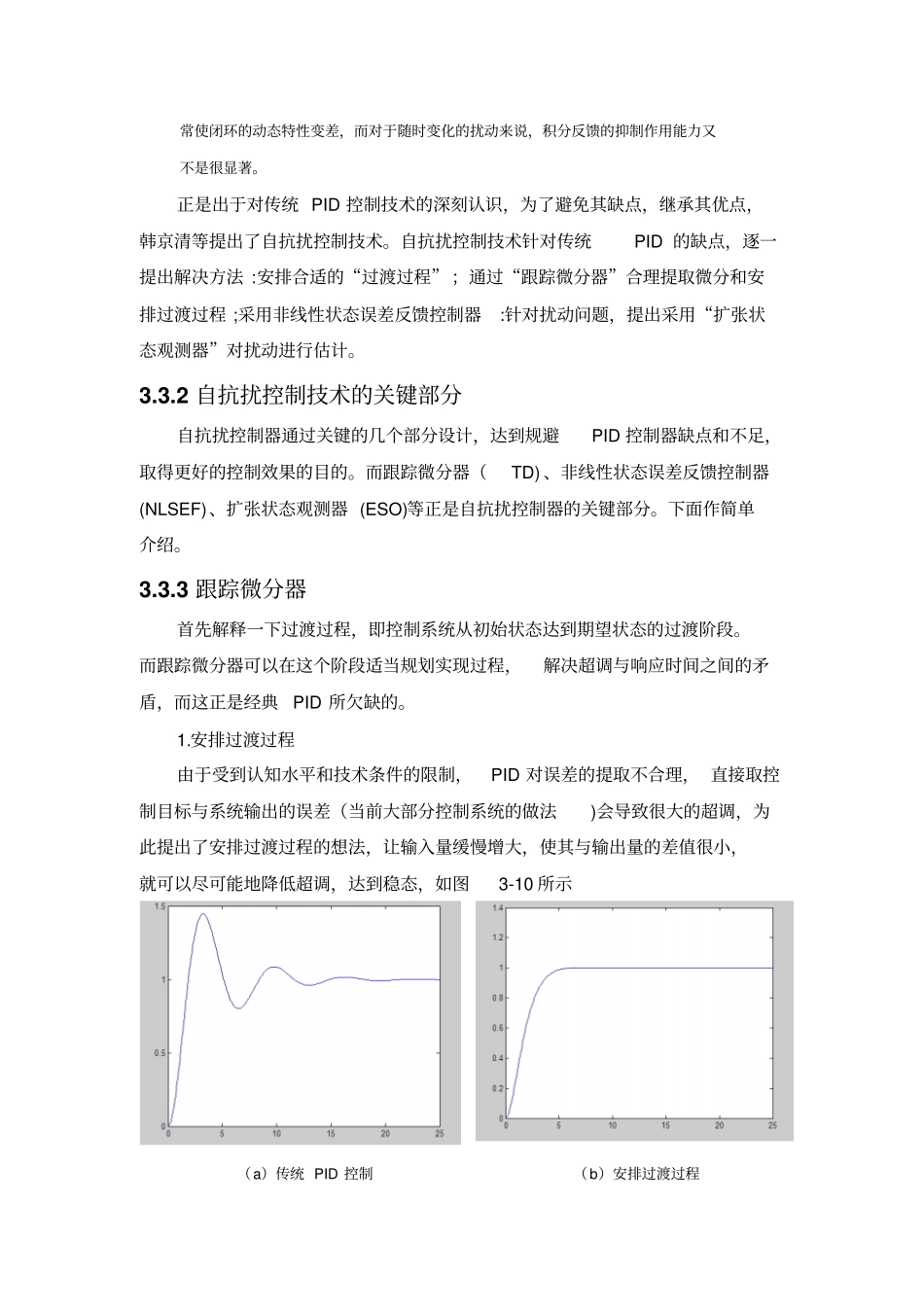
4、PID 是用误差的过去、现在和将来的适当组