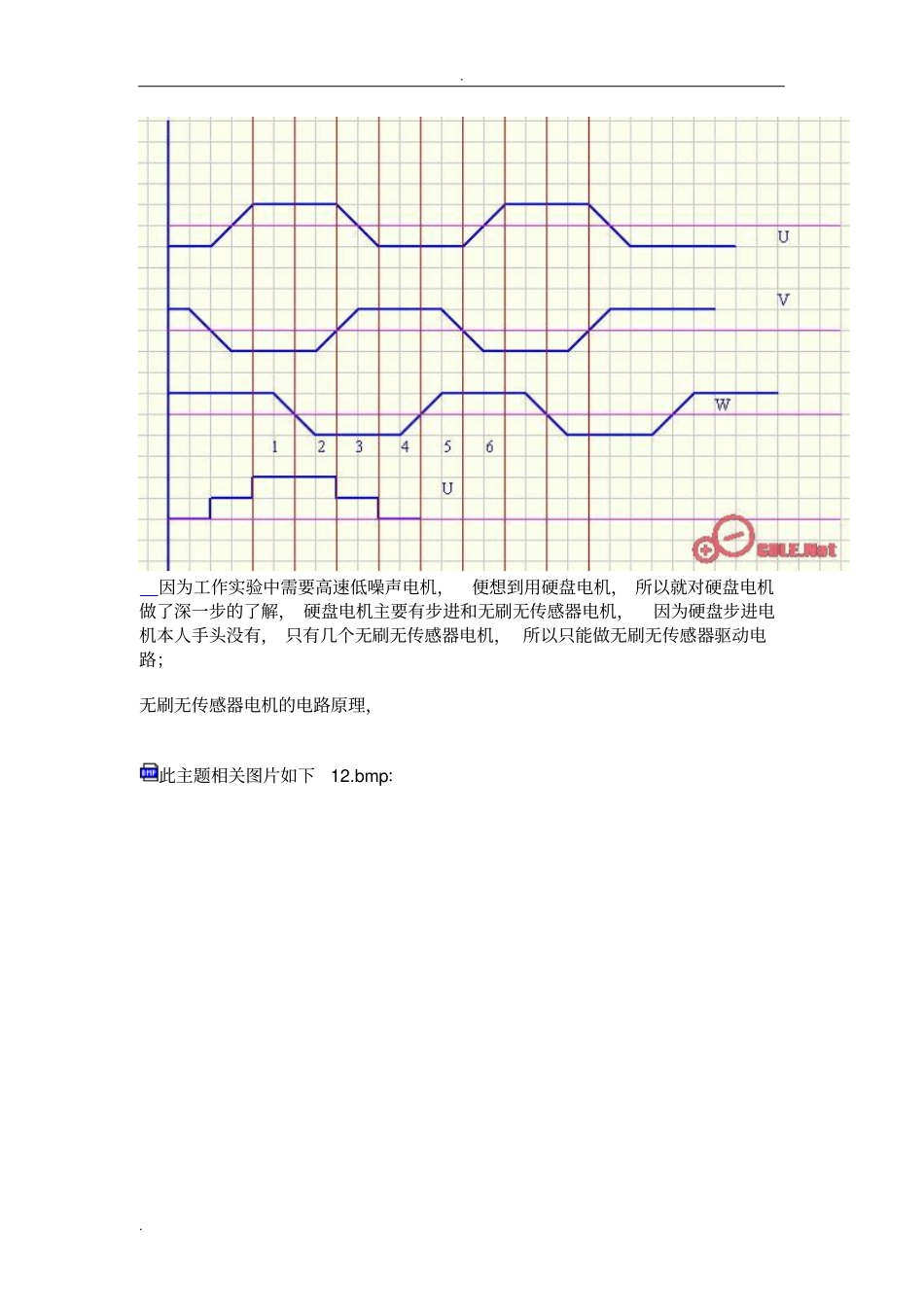
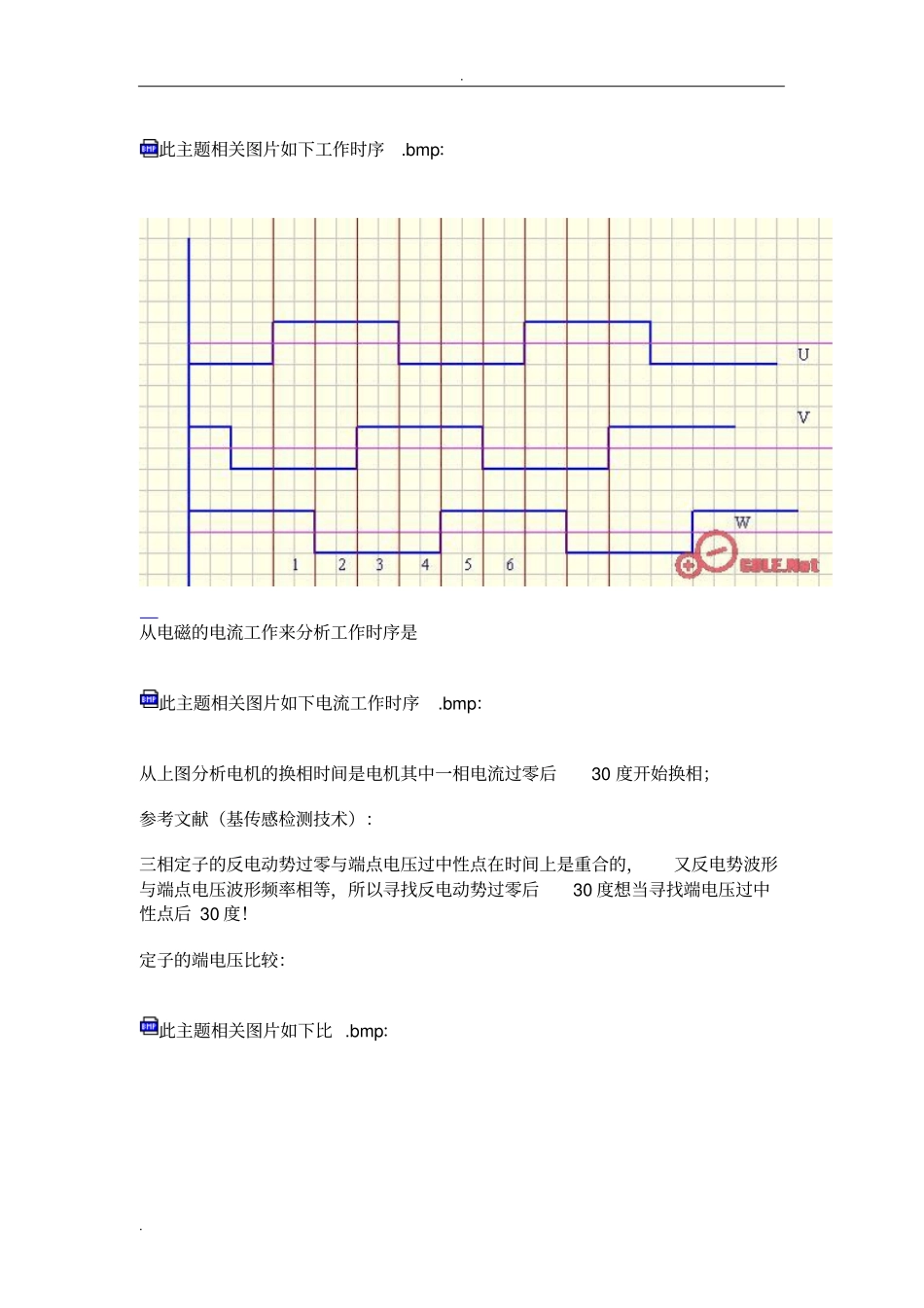
因为工作实验中需要高速低噪声电机,便想到用硬盘电机, 所以就对硬盘电机做了深一步的了解, 硬盘电机主要有步进和无刷无传感器电机,因为硬盘步进电机本人手头没有, 只有几个无刷无传感器电机, 所以只能做无刷无传感器驱动电路;无刷无传感器电机的电路原理,此主题相关图片如下12
采用二相导通星形六壮态控制,工作时序如下:1:Q1>>U>>V>>Q5 2:Q1>>U>>W>>Q6 3:Q2>>V>>W>>Q6 4:Q2>>V>>U>>Q4 5:Q3>>W>>U>>Q4 6:Q3>>W>>V>>Q5 只要满足这个导通时序就能给电机转起来(这时可看作是一个步进电机 ),但这只能在低速下转动,高速下会失步不能正常转动
这是理想的工作时序
此主题相关图片如下工作时序
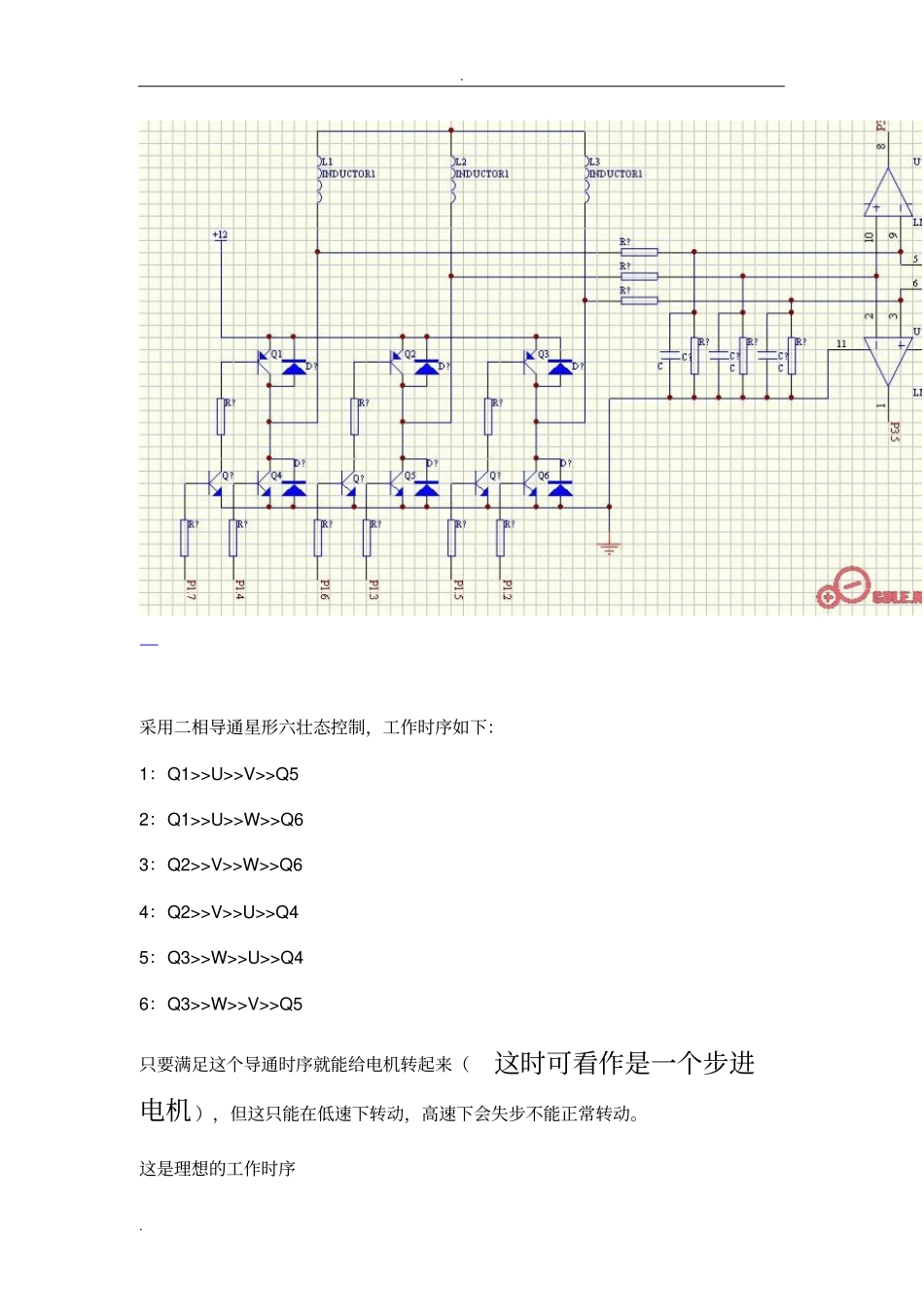
bmp:从电磁的电流工作来分析工作时序是此主题相关图片如下电流工作时序
bmp:从上图分析电机的换相时间是电机其中一相电流过零后30 度开始换相;参考文献(基传感检测技术):三相定子的反电动势过零与端点电压过中性点在时间上是重合的,又反电势波形与端点电压波形频率相等,所以寻找反电动势过零后30 度想当寻找端电压过中性点后 30 度
定子的端电压比较:此主题相关图片如下比
比较后所得出的数据如下:此主题相关图片如下xet
从上表工作时序来分析可得出如下:当时 1 序要换相时,即 P3
5=0 当时 2 序要换相时,即 P3
4=1 当时 3 序要换相时,即 P3
3=0 当时 4 序要换相时,即 P3
5=1 当时 5 序要换相时,即 P3
4=0 当时 6 序要换相时,即 P3
3=1 有了如上的原理分析,就可开始接线路板了
找了几个硬盘此主题相关图片如下140
用原来的实验板,各TOP41,42,做了驱动板此主题相关图片如下141