2- 1 第2 章 转速、电流双闭环直流调速系统 和调节器的工程设计方法 2
1 转速、电流双闭环直流调速系统及其静特性 采用 PI 调节的单个转速闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差
但是,如果对系统的动态性能要求较高,单闭环系统就难以满足需要,这主要是因为在单闭环系统中不能控制电流和转矩的动态过程
电流截止负反馈环节是专门用来控制电流的,并不能很理想地控制电流的动态波形,图 2-1a)
在起动过程中,始终保持电流(转矩)为允许的最大值,使电力拖动系统以最大的加速度起动,到达稳态转速时,立即让电流降下来,使转矩马上与负载相平衡,从而转入稳态运行
这样的理想起动过程波形示于图 2-1b
为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值dmI的恒流过程
按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程
应该在起动过程中只有 电流负反馈,没 有 转速负反馈,达到稳态转速后 ,又 希 望 只要转速负反馈,不再 让电流负反馈发 挥 作 用
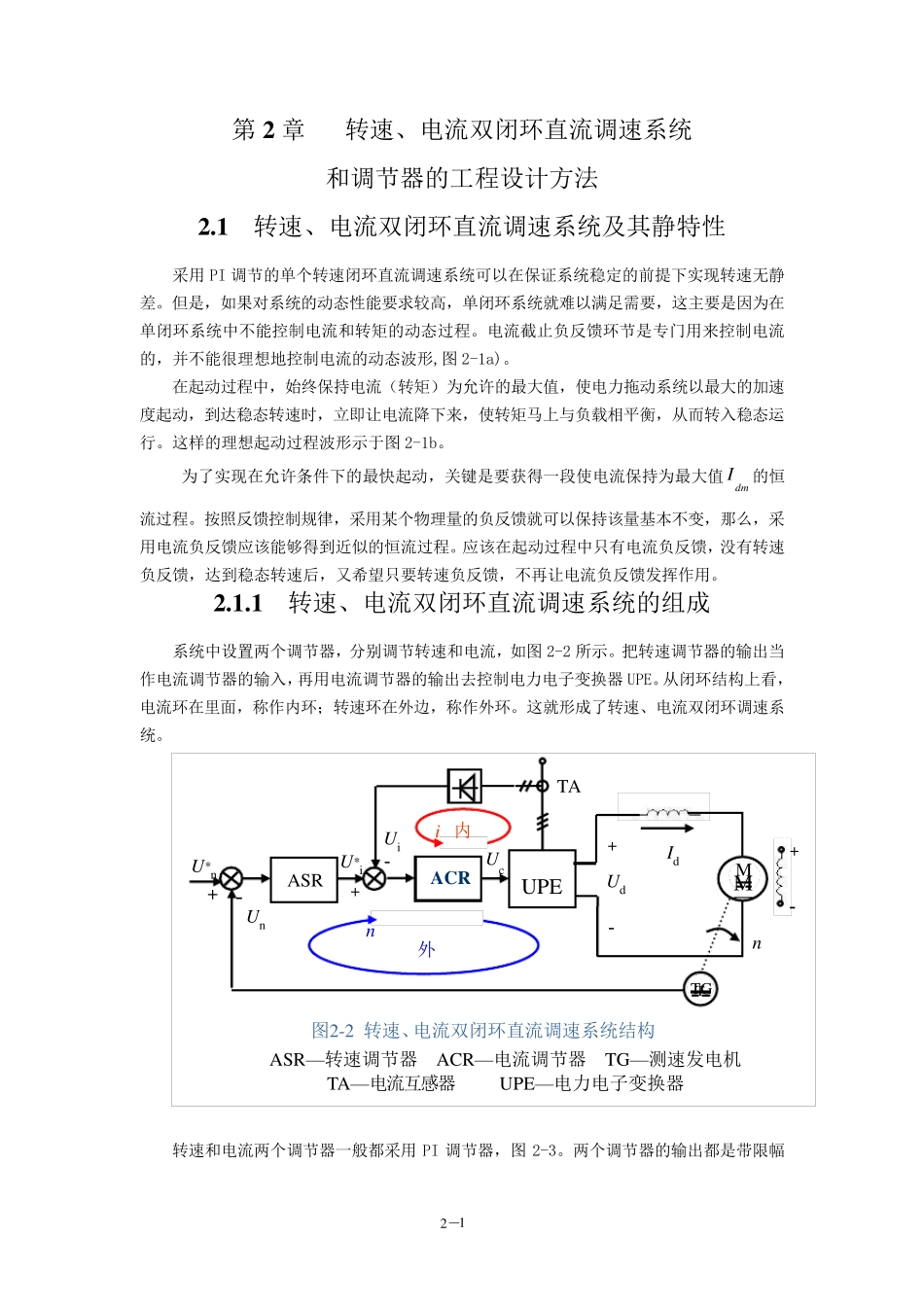
1 转速、电流双闭环直流调速系统的组 成 系统中设置 两 个调节器,分 别 调节转速和电流,如图 2-2 所 示
把 转速调节器的输 出 当作 电流调节器的输 入,再 用电流调节器的输 出 去 控制电力电子 变换 器 UPE
从闭环结 构 上看 ,电流环在里 面 ,称 作 内 环; 转速环在外 边 ,称 作 外 环
这就形成 了转速、电流双闭环调速系统
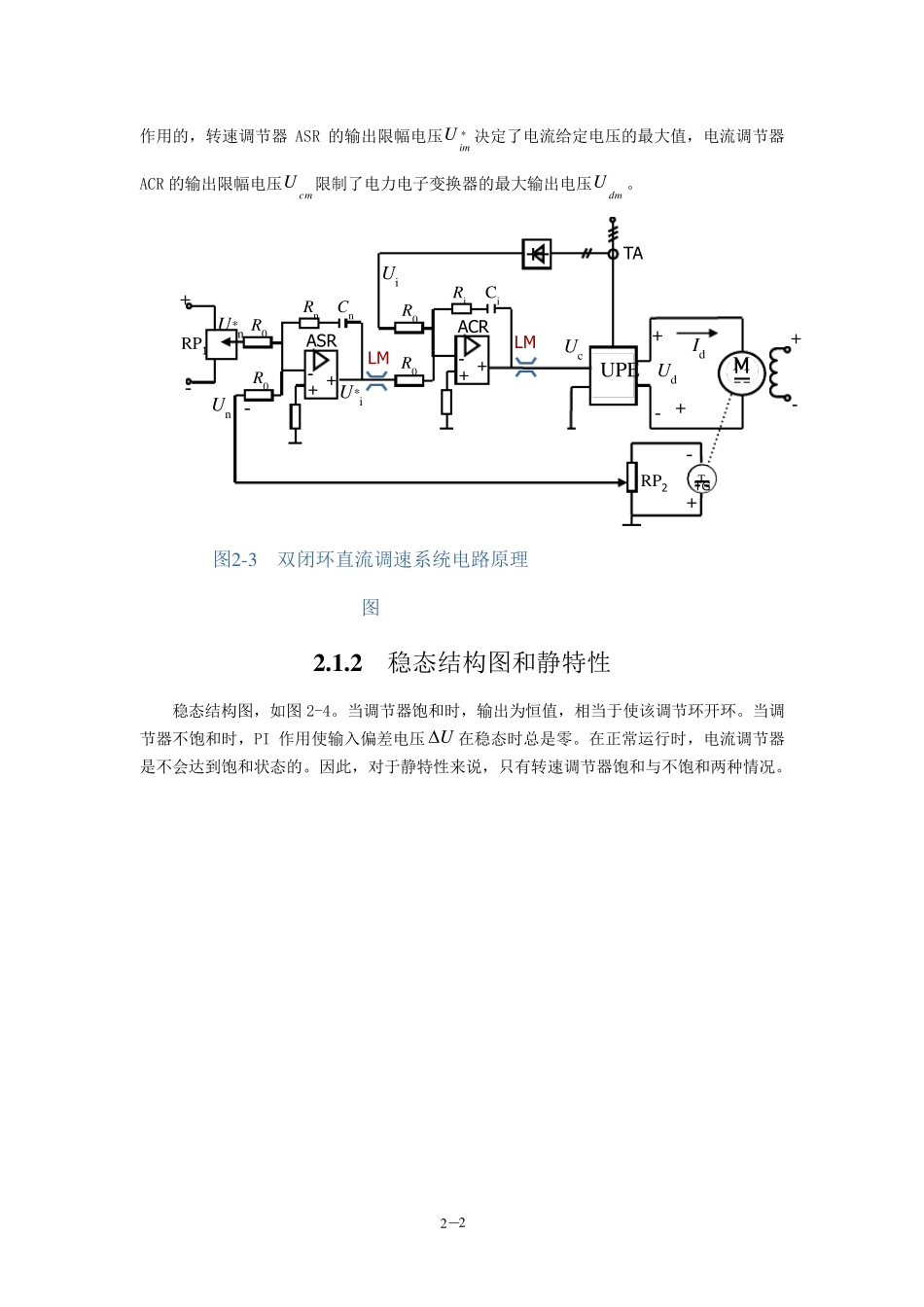
转速和电流两 个调节器一般 都 采用 PI 调节器,图 2-3
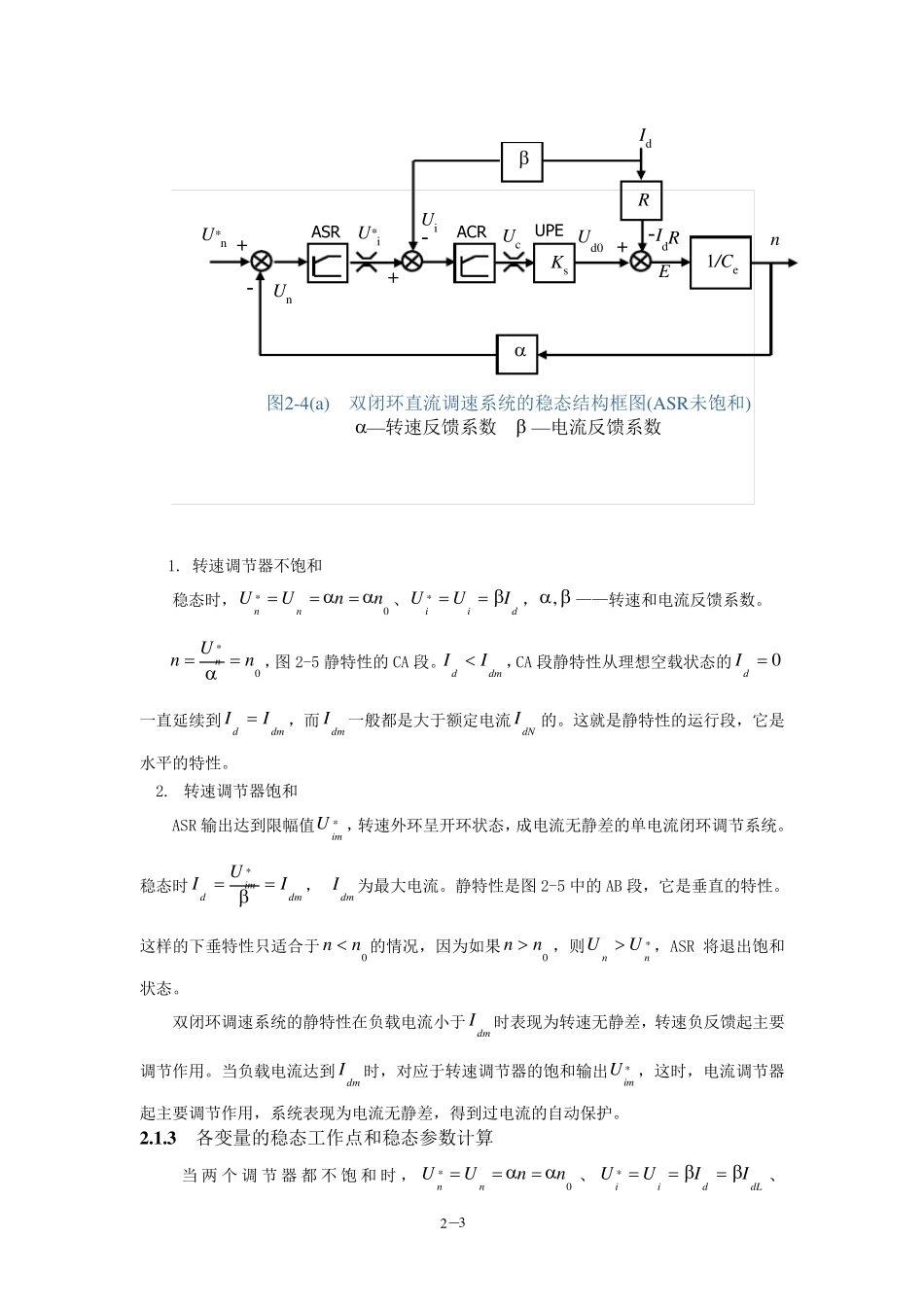
两 个调节器的输 出 都 是带 限 幅+ TG n ASR A C R U*n + - Un Ui U*i + - Uc TA M + - Ud Id UPE - M T图2-2 转速、电流双闭环直流调速系统结 构 AS