第一步,安装 GIT,下载连接 https://msysgit
googlecode
com/files/Git-1
4-preview20130916
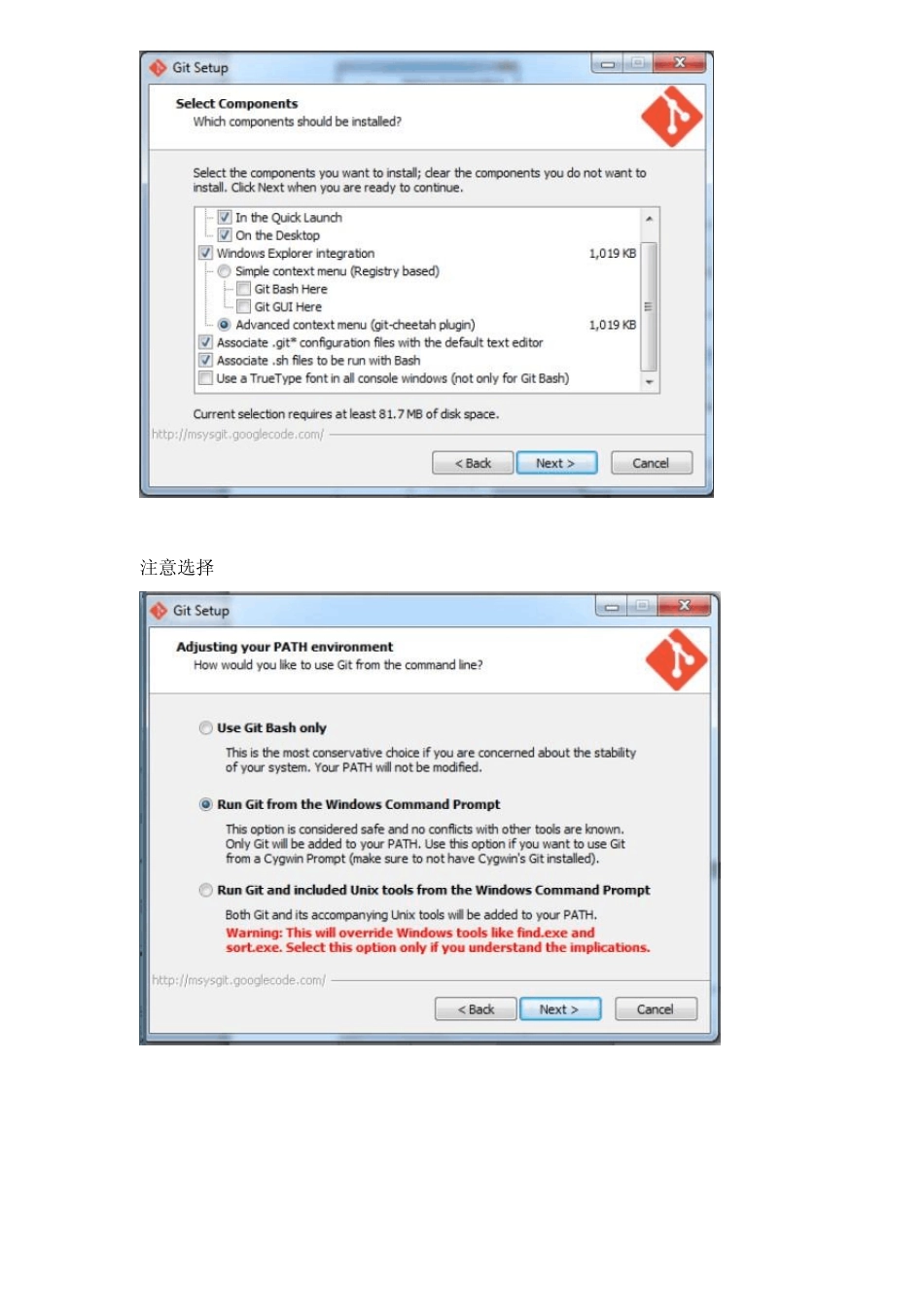
exe 安装步骤请按下图一步一步 NEXT 注意选择 run git from the windows command prompt 剩下的继续一步一步 nex t 直至安装完成 第二步:安装完成后打开电脑本地磁盘 C 盘,在根目录下新建一个文件夹,命名为 GIT,然后打开 GIT 文件夹,空白处右键选择 Git Bash 点击后会跳出一个命令行窗口 输入以下命令回车:git clone git://githu b
com/diy drones/ardu pilot
git 程序会自动在GIT 文件夹内创建一个 ardu pilot 项目,并从网站上下载 ardu pilot 源代码,请保持网络畅通 下载完成后提示如下 第三步:安装MHV_AVR_TOOLS 下载连接 http://firmware
diydrones
com/Tools/Arduino/MHV_AVR_Tools_20121007
exe 这个安装直接下一步下一步就行了,没什么要注意的 第四步:安装最新版内嵌 4
2 版 GCC 的 Ardupilot 专用 Arduino IDE 下载地址 http://firmware
diydrones
com/Tools/Arduino/ArduPilot-Arduino-1
3-gcc-4
2-windows
zip 下载完成后请解压到 C 盘根目录 然后打开 ArduPilot-Arduino-1
3-gcc-4
2-windows 文件夹,找到 arduino 应用程序图标,鼠标右键选择发送快捷方式到桌面,方便使用 第五步:配置 Arduino 打开 Arduino,点击文件,参数设