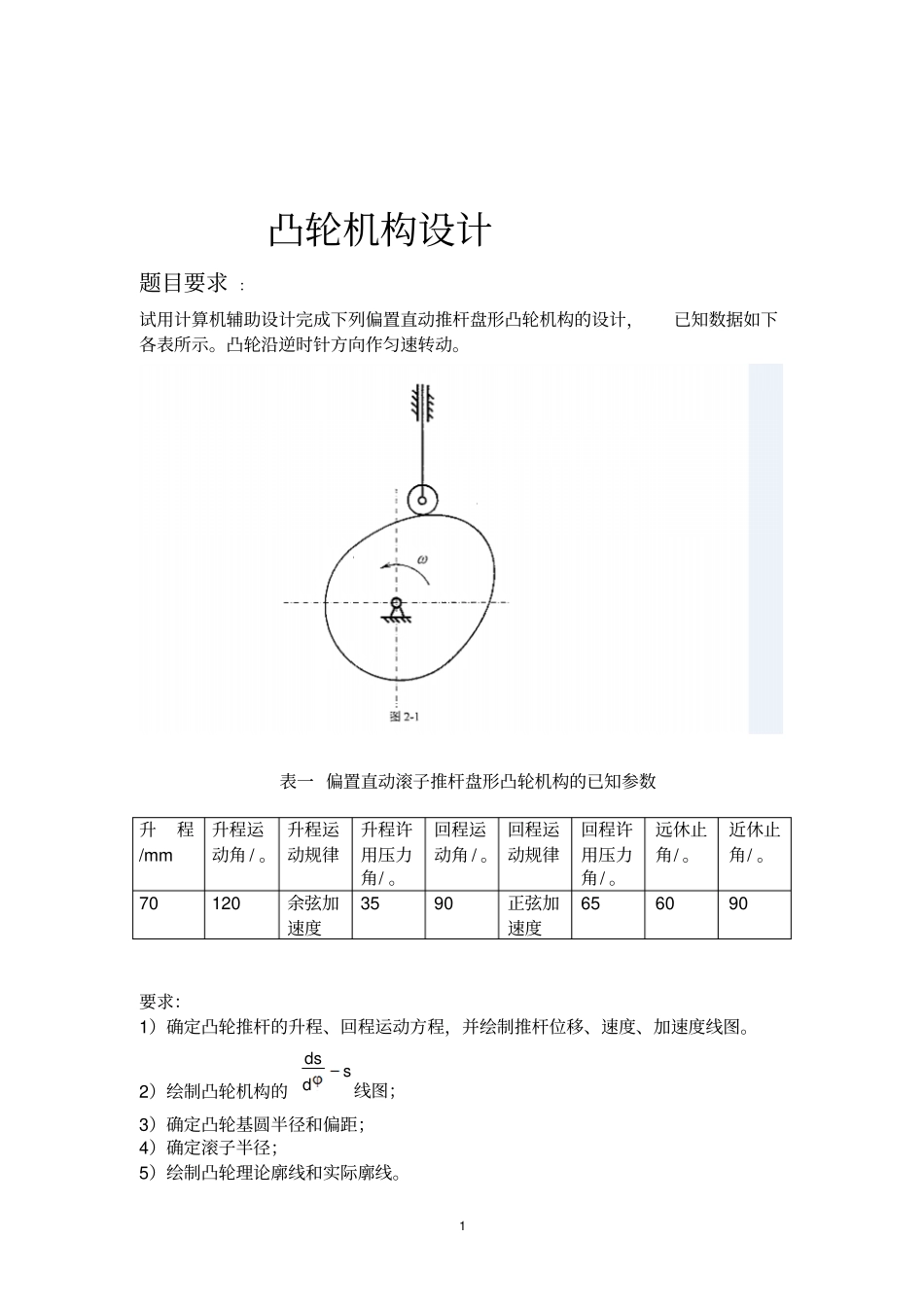
1 凸轮机构设计题目要求 :试用计算机辅助设计完成下列偏置直动推杆盘形凸轮机构的设计,已知数据如下各表所示
凸轮沿逆时针方向作匀速转动
表一 偏置直动滚子推杆盘形凸轮机构的已知参数升程/mm 升程运动角 /
升程运动规律升程许用压力角/
回程运动角 /
回程运动规律回程许用压力角/
70 120 余弦加速度35 90 正弦加速度65 60 90 要求:1)确定凸轮推杆的升程、回程运动方程,并绘制推杆位移、速度、加速度线图
2)绘制凸轮机构的sdds线图;3)确定凸轮基圆半径和偏距;4)确定滚子半径;5)绘制凸轮理论廓线和实际廓线
2 推杆运动规律:(取32w)1)推程运动规律:由余弦加速度运动公式可得)cos(1211hs)sin(2hwv111)cos(2h112122 wa2)回程运动规律:正弦加速度运动公式可得)2sin(211322ThsT)2cos(1v322Thw)2sin(2a32222Thw试中: T=)(s1-经带入计算可得:s1 = 0
035*(1 - cos(1
5*x)); v1=0
105/2 * w * sin(1
5 * x); a1 = 0
1575/2 * w^2
* cos(1
5*x); s3 = 0
070*(3 - 2*z/pi + 1/(2*pi)
*sin (4*z - 4* pi)); v3 = -0
140/pi * w
* (1 - cos(4*z - 4* pi)); a3 = 0
56 * w^2/pi
*sin(4*z - 4* pi); 三 计算程序( matlab )(1)推杆位移、速度、加速度线图编程;a
位移与转角曲线w = 2*pi/3 x = 0:(pi/100):(2*pi/3); s1 = 0
035*(1 - cos(1
5*x)); v1=0