机电产品模型设计及控制一、实验目的1
了解常用机械传动机构的形式和使用条件
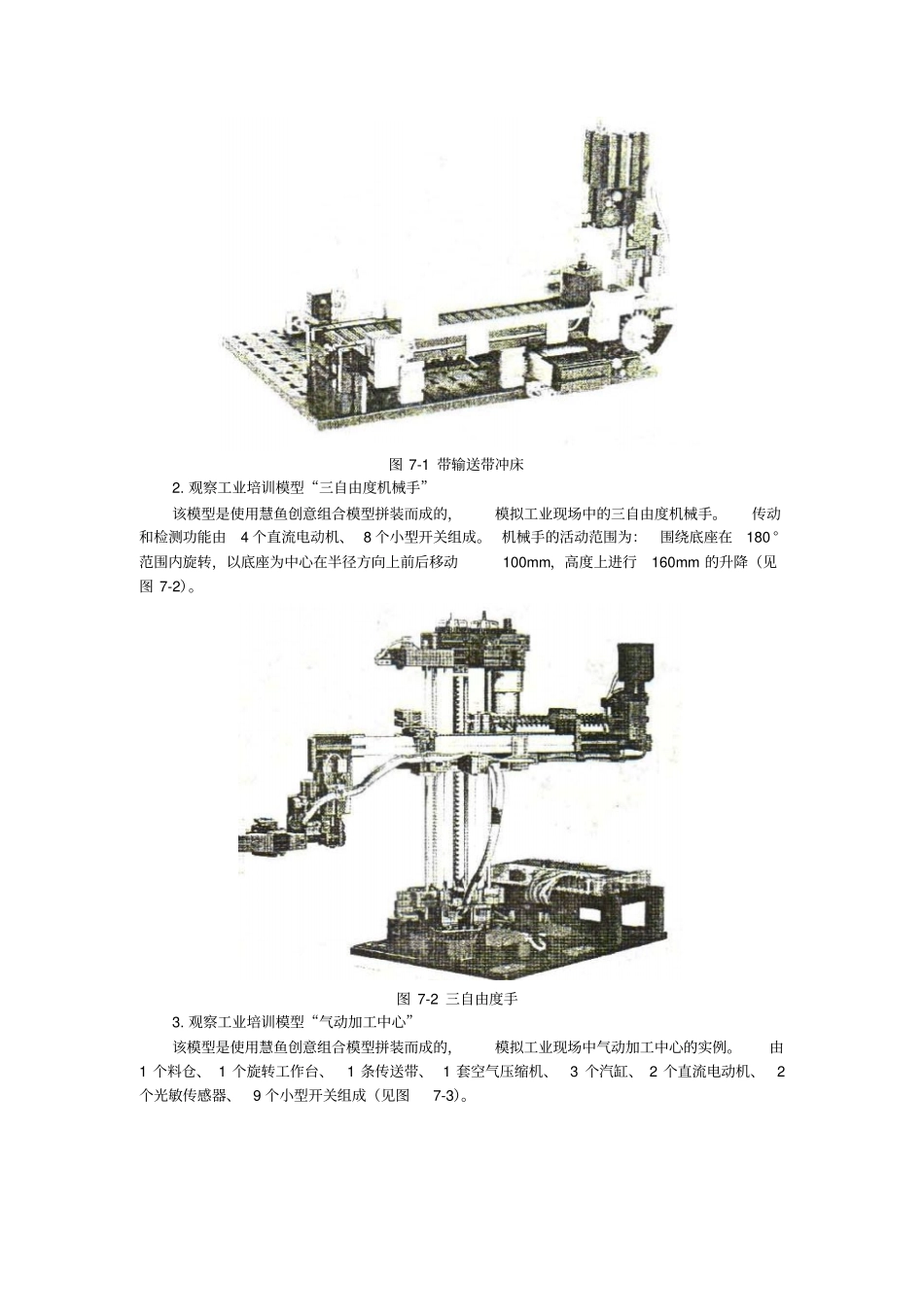
了解典型机电系统的布置形式及工作原理
了解机械系统的基本运动控制方法
培养综合设计、优化设计机械系统的能力
培养动手能力、创新能力和编程能力
二、实验原理本实验使用的器材为德国慧鱼公司出品的“慧鱼创意组合模型” (见附录Ⅳ)
该模型由多种构件组成,通过接口板和计算机相连,使用软件控制模型的运动
慧鱼创意组合模型提供了工业机器人、移动机器人、实验机器人、仿生机器人、气动机器人等套装产品, 这些套件中除了少数特殊零件外(如工业机器人的机械手、移动机器人的车轮、启动机器人的气动元件、实验机器人的链条和齿条等),大部分零件是相同的,可以通用
慧鱼创意组合模型由各种各样的构件组合拼装而成,因此“构件” 是模型的最小组成部分
它的构件大体上可以分为机械构件、电气构件和气动构件3 类
机械构件组要包括六面拼接体、连杆、 链条、 履带、 齿轮(普通齿轮、 锥齿轮、 斜齿轮、内啮合齿轮) 、出轮轴、齿条、蜗轮、蜗杆、凸轮、弹簧、曲轴、万向节、差速器、齿轮箱等
电气构件主要包括直流电机、大功率电机、传感器(光敏、热敏、螆敏、小型开关)、灯泡、电磁气阀、直流变压器、可充电电源、红外线遥控装置、电脑接口板(串口、并口、USB 端口)、 PLC 接口板等
气动构件主要包括储气罐、气缸、活塞、气弯头、手动气阀、电磁气阀、气管等
通过以上基本构件,学生可自行设计并组装机电产品模型,并通过软件或高级语言编程控制模型的运动,实现预期的设计目的
三、实验内容1
观察慧鱼工业培训模型,了解常用机械传动机构、传感器布置模式、 典型机电液系统
遵照实例组装机电产品模型,了解慧鱼创意组合模型的基本使用方法
四 实验步骤1
观察工业培训模型“带输送带的冲床”该模型是使用慧鱼创意组合模型拼装而成的,模拟工业现场