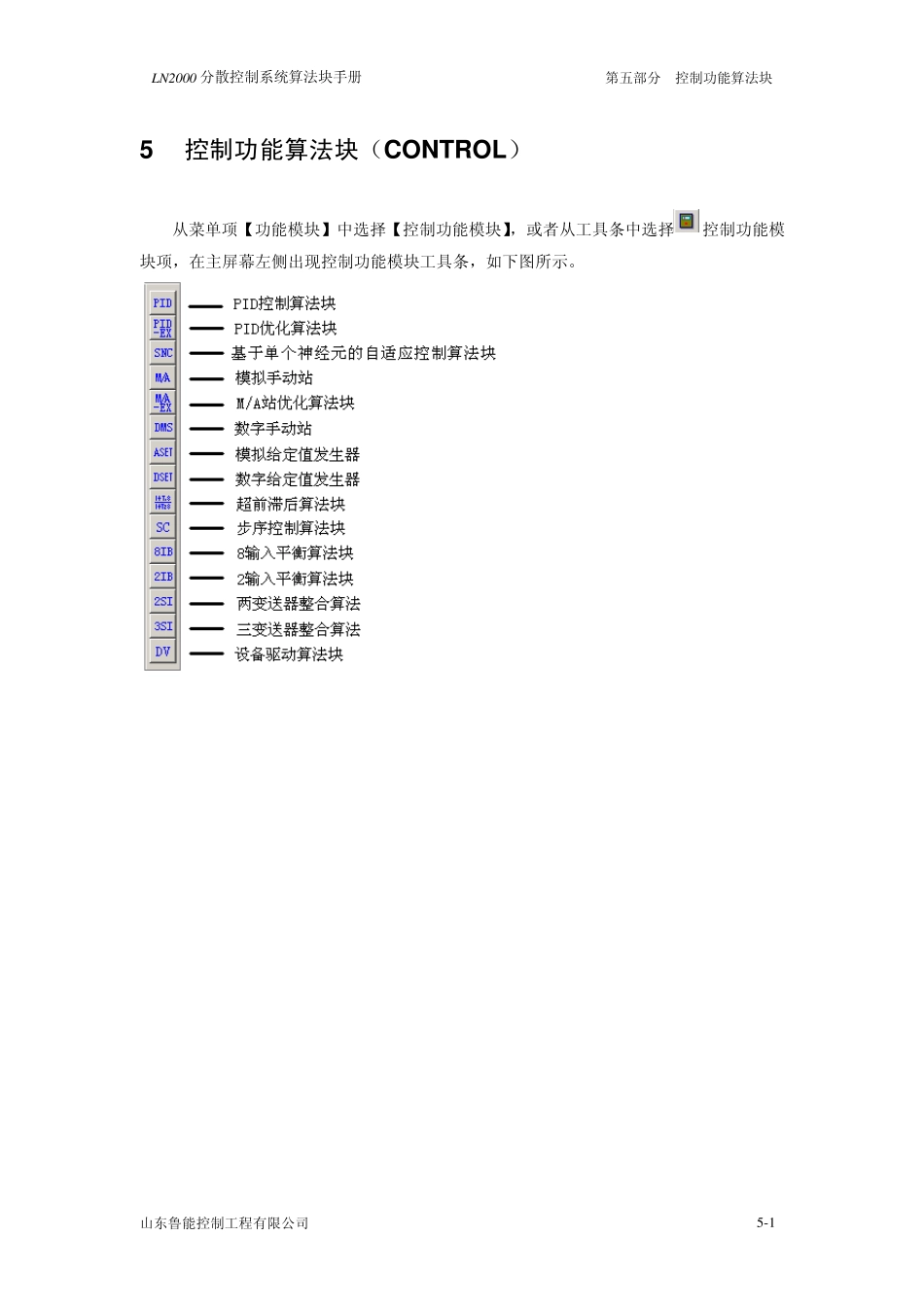
LN2000 分散控制系统算法块手册 第五部分 控制功能算法块 5 控制功能算法块(CONTROL) 从菜单项【功能模块】中选择【控制功能模块】,或者从工具条中选择控制功能模块项,在主屏幕左侧出现控制功能模块工具条,如下图所示
山东鲁能控制工程有限公司 5 -1LN2000 分散控制系统算法块手册 第五部分 控制功能算法块 5
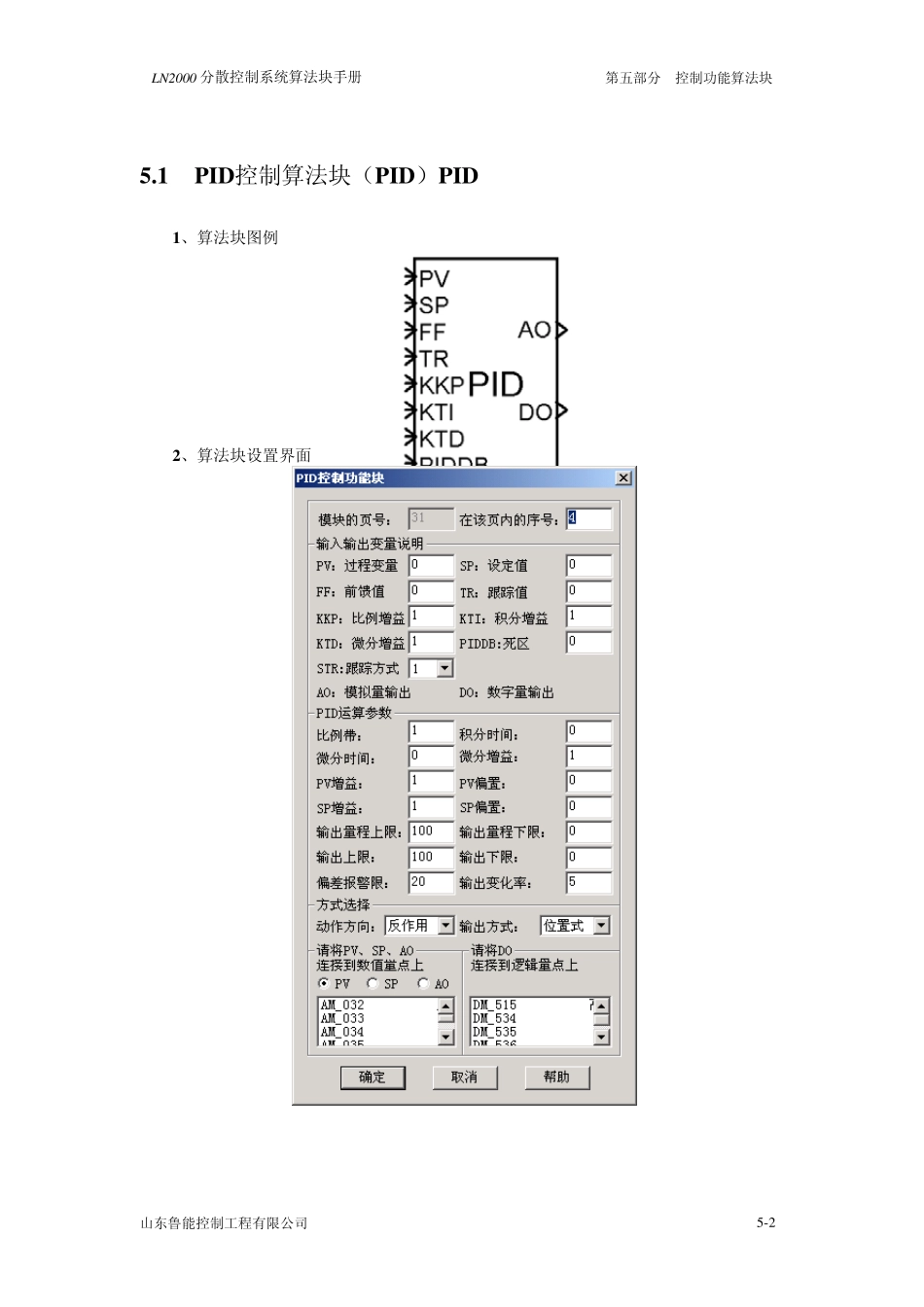
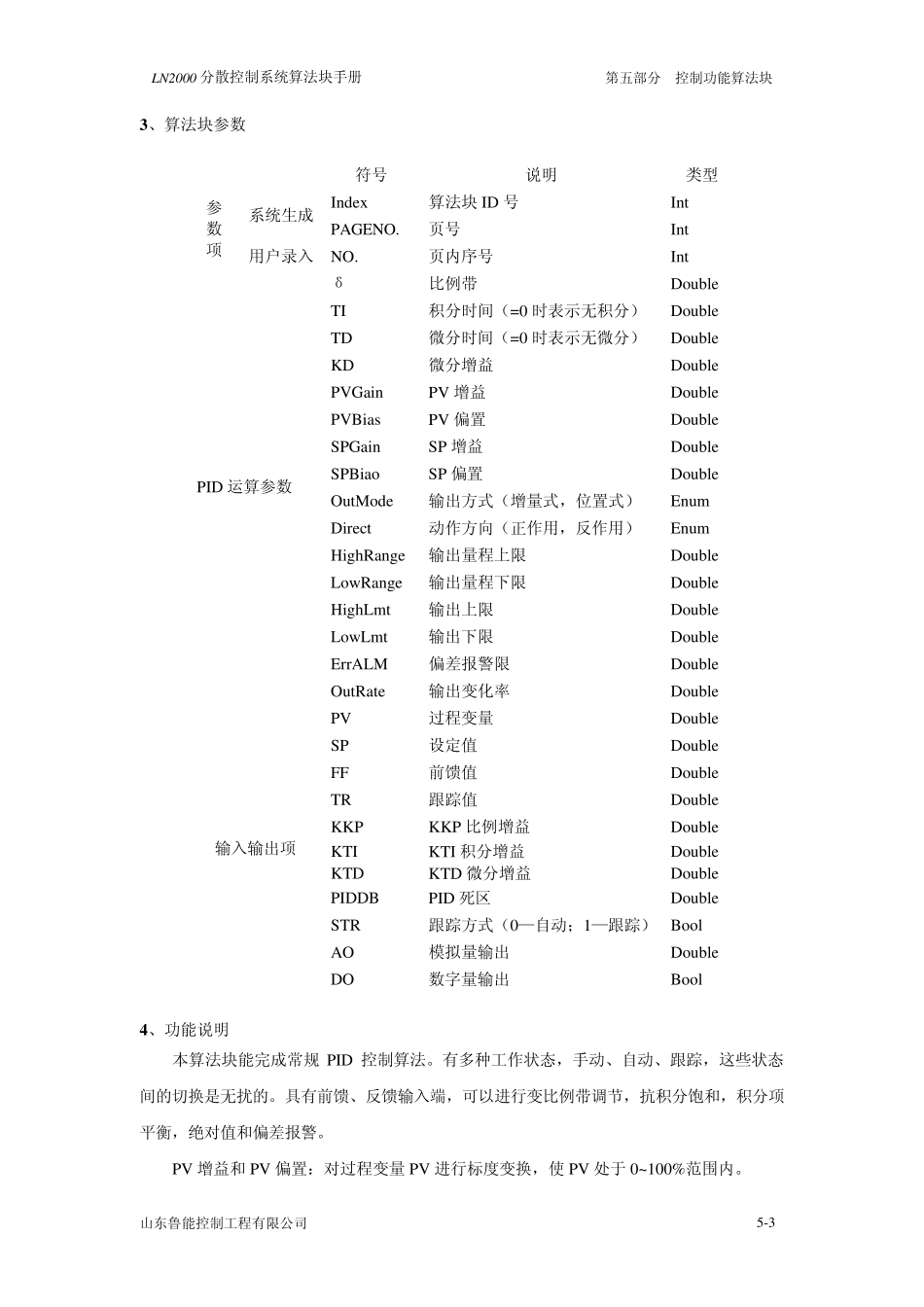
1 P ID控制算法块(P ID)P ID 1、算法块图例 2、算法块设置界面 山东鲁能控制工程有限公司 5 -2LN2000 分散控制系统算法块手册 第五部分 控制功能算法块 3 、算法块参数 符号 说明 类型 Index 算法块ID 号 Int 系统生成 PAGENO
页号 Int 参 数 项 用户录入 NO
页内序号 Int δ 比例带 Double TI 积分时间(=0 时表示无积分) Double TD 微分时间(=0 时表示无微分) Double KD 微分增益 Double PVGain PV 增益 Double PVBias PV 偏置 Double SPGain SP 增益 Double SPBiao SP 偏置 Double OutMode 输出方式(增量式,位置式) Enum Direct 动作方向(正作用,反作用) Enum HighRange 输出量程上限 Double LowRange 输出量程下限 Double HighLmt 输出上限 Double LowLmt 输出下限 Double ErrALM 偏差报警限 Double PID 运算参数 OutRate 输出变化率 Double PV 过程变量 Double SP 设定值 Double FF 前馈值 Double TR 跟踪值 Double KKP KKP 比例增益 Double KTI KTI 积分增益 Double KTD KTD 微分增益 Double