MMA8451 三轴加速度传感器,16 引脚,QFN 封装,数字I2C 输出,8 位/14 位精度可选,量程错误
未找到引用源
未找到引用源
未找到引用源
8g 可选,电源供电1
输出数据速率从1
56 到800Hz
有两个可编程的中断引脚,7 个中断源
可检测自由落体、运动、脉冲、振动等、倾角等
32 个采样 FIFO,每次采样都通过高通滤波后传入 FIFO
典型应用有:电子罗盘,静态姿态、运动检测,笔记本电子书等便携设备的翻滚、自由落体检测,实时的方向检测可用于虚拟现实设备或 3d 游戏中的位置检测,便携设备的节能应用中的运动检测等等
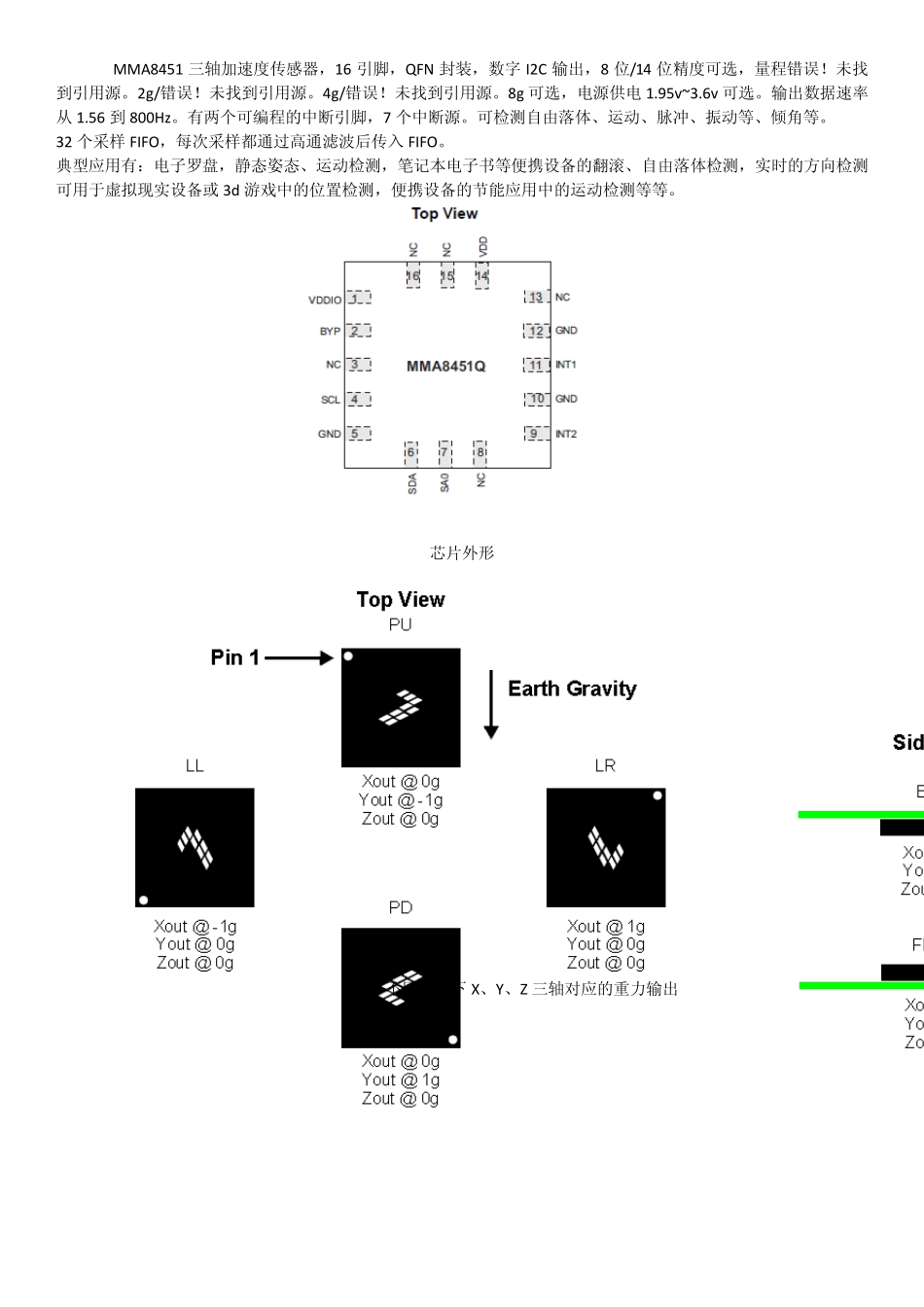
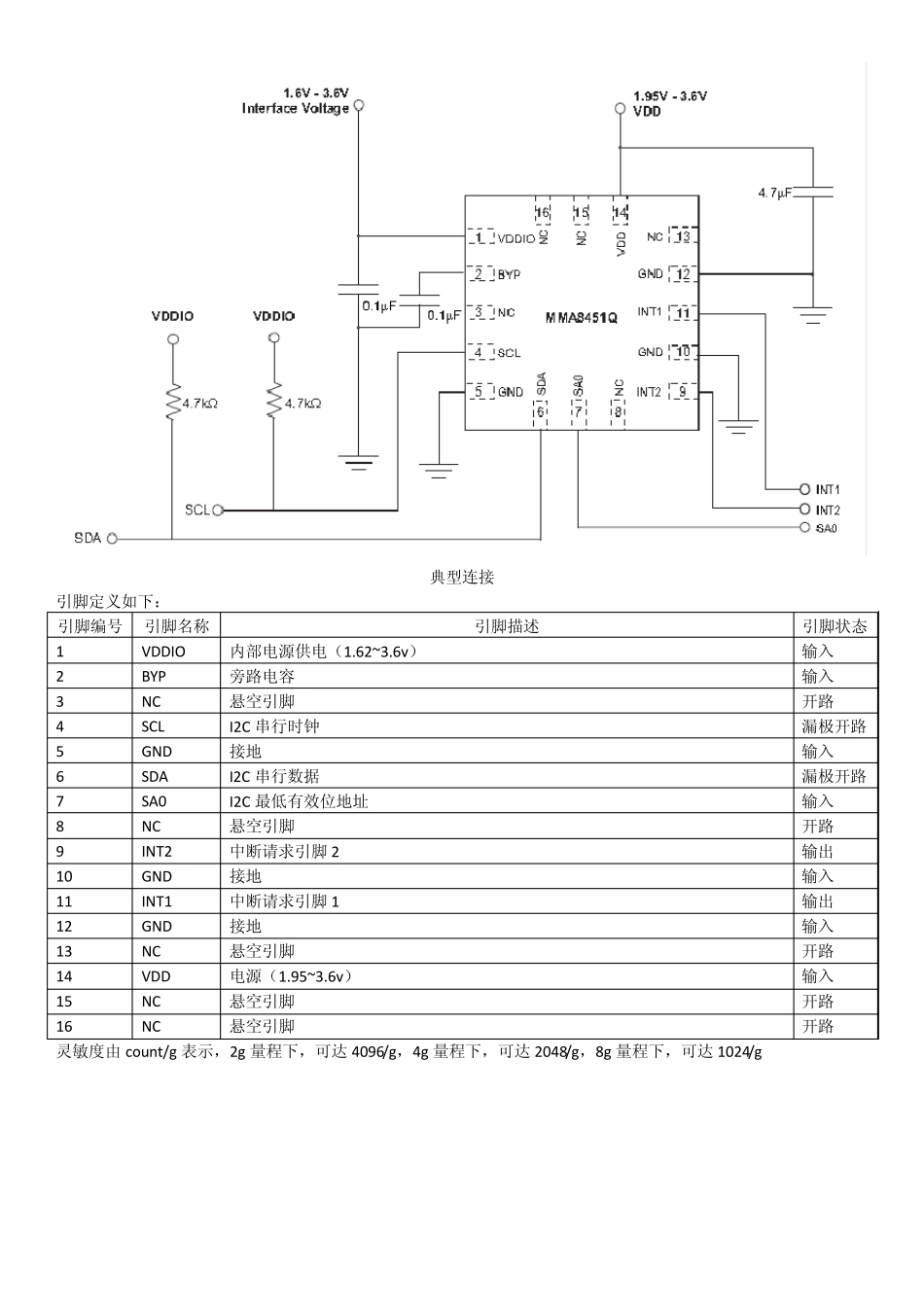
芯片外形 不同姿态下 X、Y、Z 三轴对应的重力输出 典型连接 引脚定义如下: 引脚编号 引脚名称 引脚描述 引脚状态 1 VDDIO 内部电源供电(1
6v) 输入 2 BYP 旁路电容 输入 3 NC 悬空引脚 开路 4 SCL I2C 串行时钟 漏极开路 5 GND 接地 输入 6 SDA I2C 串行数据 漏极开路 7 SA0 I2C 最低有效位地址 输入 8 NC 悬空引脚 开路 9 INT2 中断请求引脚2 输出 10 GND 接地 输入 11 INT1 中断请求引脚1 输出 12 GND 接地 输入 13 NC 悬空引脚 开路 14 VDD 电源(1
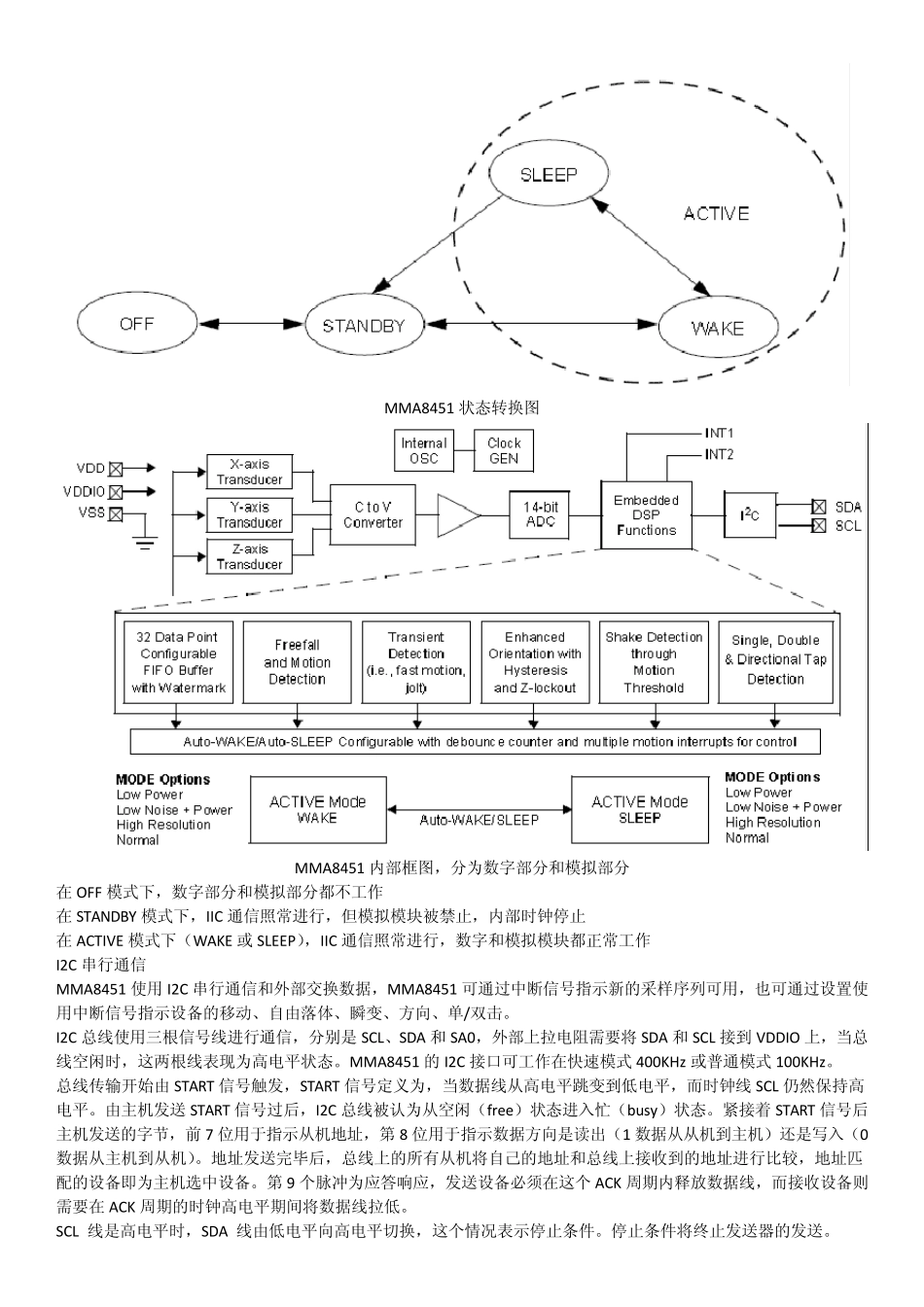
6v) 输入 15 NC 悬空引脚 开路 16 NC 悬空引脚 开路 灵敏度由 count/g 表示,2g 量程下,可达 4096/g,4g 量程下,可达 2048/g,8g 量程下,可达 1024/g MMA8451 状态转换图 MMA8451 内部框图,分为数字部分和模拟部分 在OFF 模式下,数字部分和模拟部分都不工作 在STANDBY 模式下,IIC 通信照常进行,但模拟模块被禁止,内部时钟停止