第 四 章 跟 驰 理 论 与 加 速 度 干扰本章将主要讨论单车道情况下的车辆跟驰现象,介绍跟驰理论,建立相应的跟驰理论模型,最后简要介绍一下加速度干扰问题
跟驰理论是运用动力学方法研究在限制超车的单车道上,行驶车队中前车速度的变化引起的后车反应
车辆跟驰行驶是车队行驶过程中一种很重要的现象,对其研究有助于理解交通流的特性
跟驰理论所研究的参数之一就是车辆在给定速度 下跟驰行驶时的平均车头间距 ,平均车头间距则可以用来估计单车道的通行能力
在对速度—间距关系的研究中,单车道通行能力的估计基本上都是基于如下公式: (4—1)式中:——单车道通行能力(veh/h);——速度(km/h);——平均车头间距(m)
研究表明,速度—间距的关系可以由下式表示: (4—2)式中系数、、 可取不同的值,其物理意义如下:——车辆长度, ; ——反应时间,;——跟驰车辆最大减速度的二倍之倒数
附加项保证了足够的空间,使得头车在紧急停车的情况下跟驰车辆不与之发生碰撞, 的经验值可近似取为 0
023s2/英尺
一般情况下 是非线性的,对于车速恒定(或近似恒定)、车头间距相等的交通流, 的近似计算公式可取为: (4—3)式中:、——分别为跟车和头车的最大减速度
跟驰理论除了用于计算平均车头间距以外,还可用于从微观角度对车辆跟驰现象进行分析,近似得出单车道交通流的宏观特性
总之,跟驰理论是连接车辆个体行为与车队宏观特性及相应流量、稳定性的桥梁
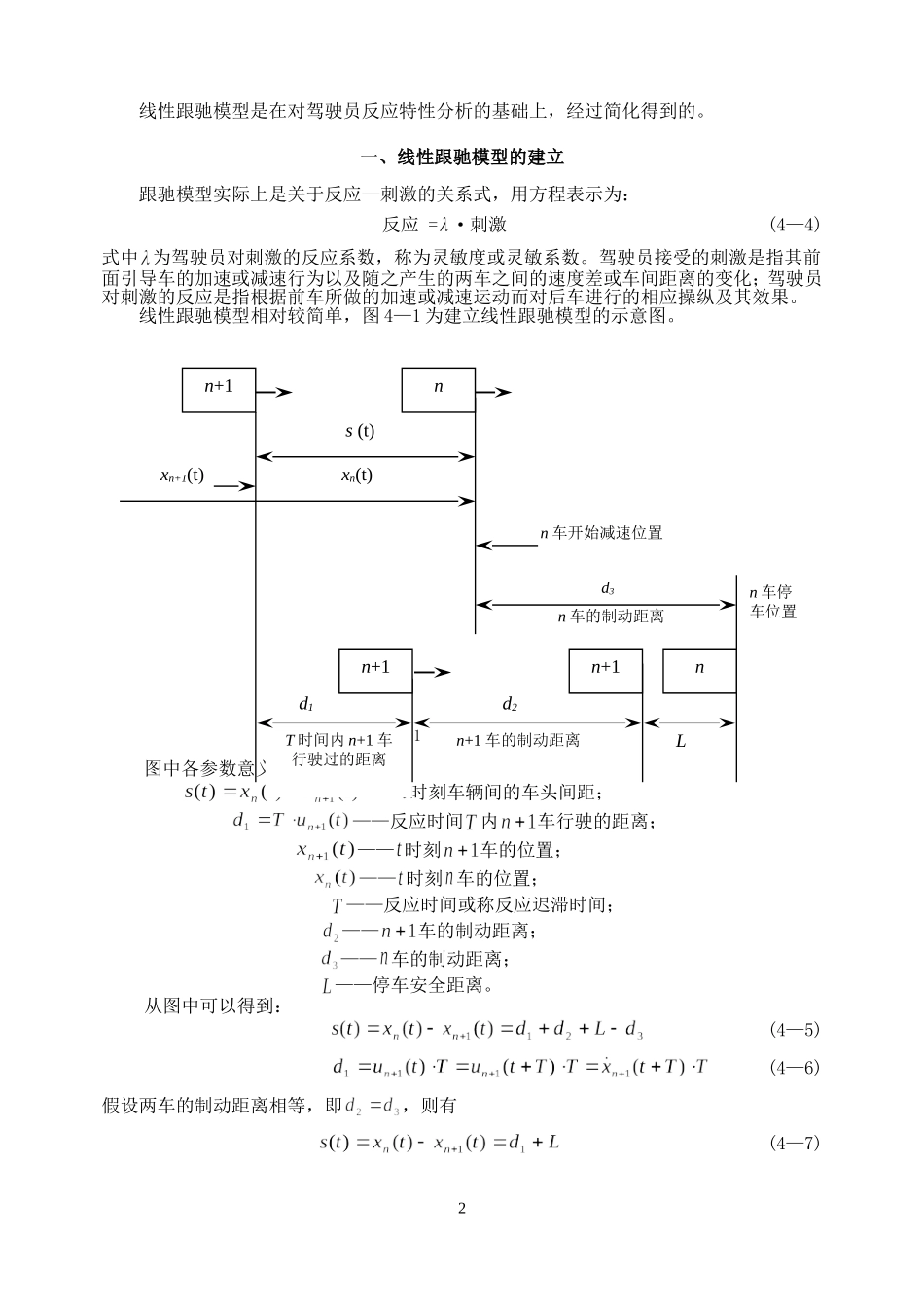
第一节 线性跟驰模型的建立单车道车辆跟驰理论认为,车头间距在 100~125m 以内时车辆间存在相互影响
分析跟驰车辆驾驶员的反应,可将反应过程归结为以下三个阶段:感知阶段:驾驶员通过视觉搜集相关信息,包括前车的速度及加速度、车间距离(前车车尾与后车车头之间的距离,不同于车头间距)、相对速度等;决策阶段:驾驶员对所获信息进行分析,决定驾驶策略;控制阶段:驾驶