§6 模糊控制原理简介§ 模糊控制系统现代控制理论已经在工业、国防、航天等许多领域获得了成功
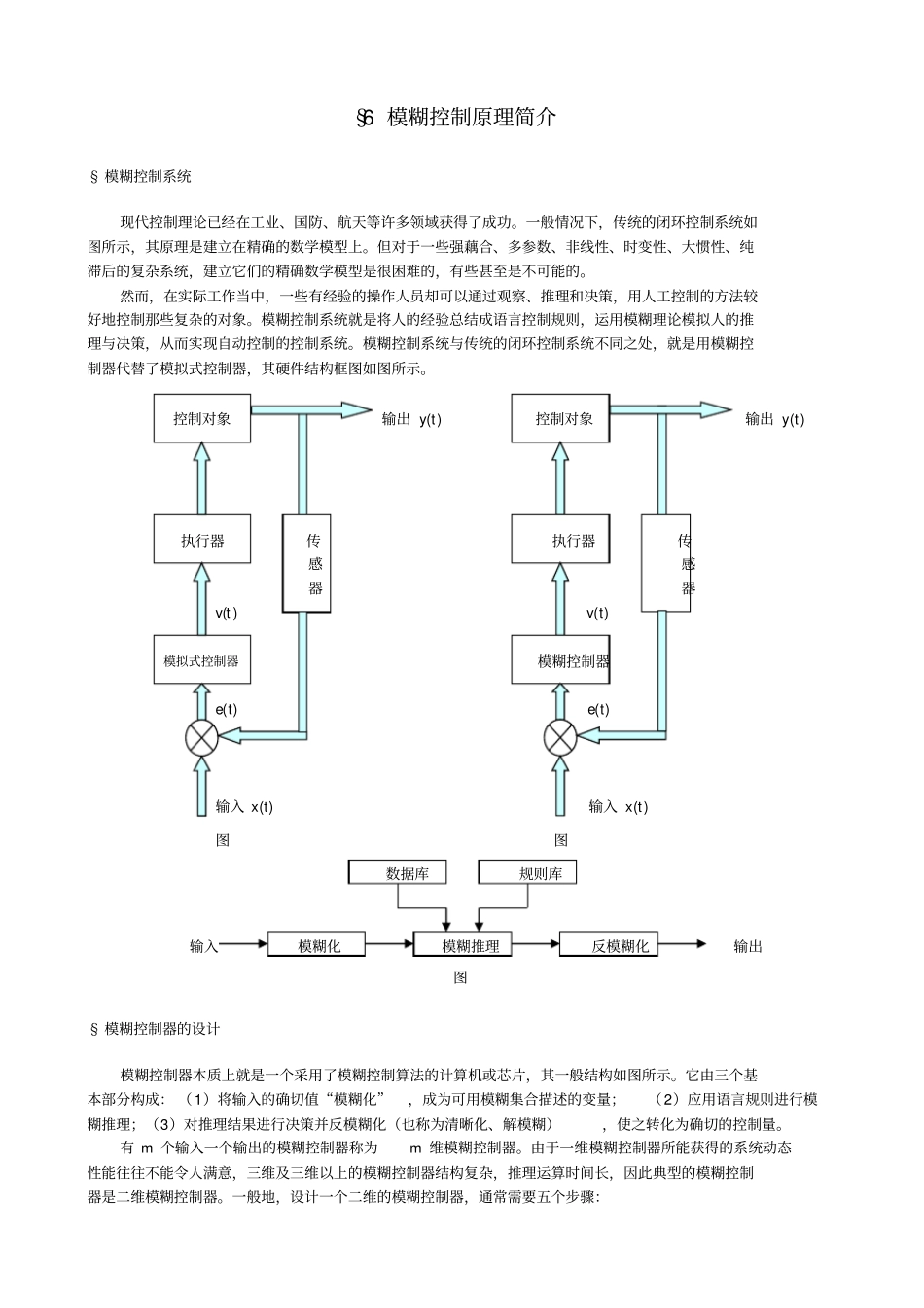
一般情况下,传统的闭环控制系统如图所示,其原理是建立在精确的数学模型上
但对于一些强藕合、多参数、非线性、时变性、大惯性、纯滞后的复杂系统,建立它们的精确数学模型是很困难的,有些甚至是不可能的
然而,在实际工作当中,一些有经验的操作人员却可以通过观察、推理和决策,用人工控制的方法较好地控制那些复杂的对象
模糊控制系统就是将人的经验总结成语言控制规则,运用模糊理论模拟人的推理与决策,从而实现自动控制的控制系统
模糊控制系统与传统的闭环控制系统不同之处,就是用模糊控制器代替了模拟式控制器,其硬件结构框图如图所示
控制对象输出 y(t) 控制对象输出 y(t) 执行器传执行器传感感器器v(t ) v(t)模拟式控制器模糊控制器e(t) e(t)输入 x(t) 输入 x(t)图图数据库规则库输入模糊化模糊推理反模糊化输出图§ 模糊控制器的设计模糊控制器本质上就是一个采用了模糊控制算法的计算机或芯片,其一般结构如图所示
它由三个基本部分构成: (1)将输入的确切值“模糊化”,成为可用模糊集合描述的变量;(2)应用语言规则进行模糊推理;(3)对推理结果进行决策并反模糊化(也称为清晰化、解模糊),使之转化为确切的控制量
有 m 个输入一个输出的模糊控制器称为m 维模糊控制器
由于一维模糊控制器所能获得的系统动态性能往往不能令人满意,三维及三维以上的模糊控制器结构复杂,推理运算时间长,因此典型的模糊控制器是二维模糊控制器
一般地,设计一个二维的模糊控制器,通常需要五个步骤:1
确定输入变量与输出变量及其模糊状态;2
输入变量的模糊化;3
建立模糊控制规则;4
进行模糊推理;5
输出变量的反模糊化
确定输入变量与输出变量及其模糊状态根据问题的背景,确定出输入变量E1、 E2 和输出变量u