5 平台式惯性导航系统的基本原理 1 、平台式惯导系统的基本组成原理 平台式惯导系统的核心是一个惯性级的陀螺稳定平台,它确定了一个平台坐标系(用 p 来标识)pppzyox,三个惯性级的加速度计的敏感轴分别沿三个坐标轴的正向安装,测得载体的加速度信息就体现为比力 fv 在平台坐标系中的三个分量pxf 、pyf 和pzf
如果使平台坐标系精确模拟其一选定的导航坐标系(用 n 来标识)nnnzyox,也便得到了比力在导航坐标系中的三个分量nxf 、nyf 和nzf ,通过必要的计算和补偿,可从中提取出载体相对导航坐标系的加速度矢量v&v 的三个分量,再通过两次积分,可得到载体相对导航坐标系的速度和位置
平台式惯导系统按所选定的导航坐标系的不同又可分为: 1)当地水平面惯性导航系统
这种系统的导航坐标系是一种当地水平坐标系,即平台系的两个轴pox 及poy 保持在水平面内,poz 轴与地垂线相重合
由于两个水平轴可指向不同的方位,故这种系统又可分为 (1)指北方位惯导系统
这种系统在工作时pox 指向地理东向(E),poy 指向地理北向(N),即平台系模拟当地地理坐标系(用 t 来标识)tttzyox
(2) 自由方位惯导系统
在系统工作中,平台poy 轴不跟踪地理北向而是与正北方向夹某个角度)(tα,称自由方位角
由于)(tα可以有多种变化规律,因此又有自由方位、游动方位等区分
2 ) 空间稳定惯导系统
这种系统的导航坐标系为惯性坐标系(用i来标识),一般采用原点定在地心的惯性坐标系
ioz 轴与地轴重合指向北极,iox 、ioy 轴处于地球赤道平面内,但不随地球转动(x 轴指向春分点)
与当地水平面惯导系统相比,平台所取的空间方位不能把运动加速度和重力加速度分离开,而要依靠计算机进行补偿
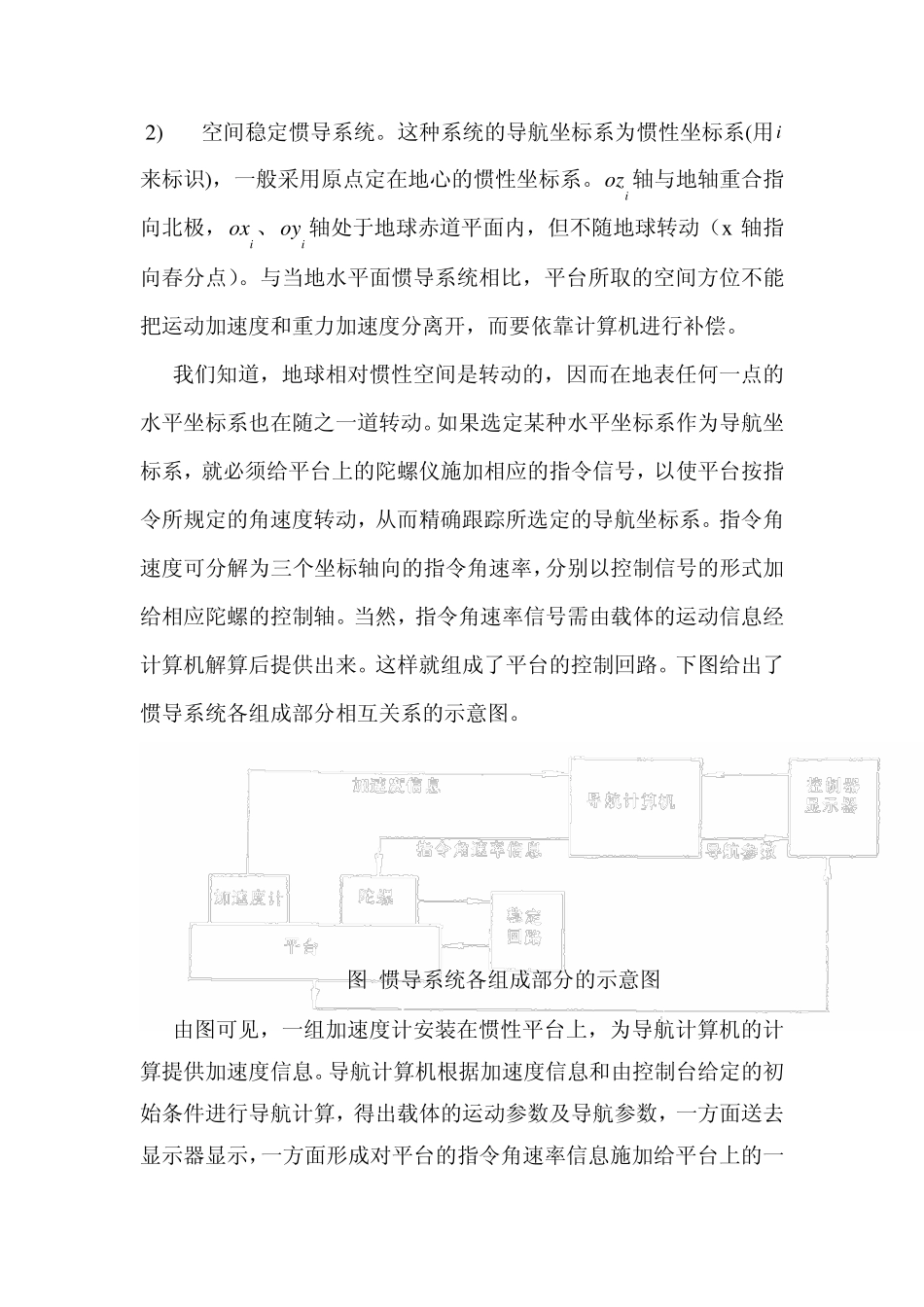
我们知道,地球相对惯性空间是转动的,因而在地表任何一点的水平坐标系也在随