5、机器人的示教与再现•机器人是按照事先编辑好的程序运动的,这个程序一般是由操作人员按任务要求示教机器人并记录运动轨迹而形成的
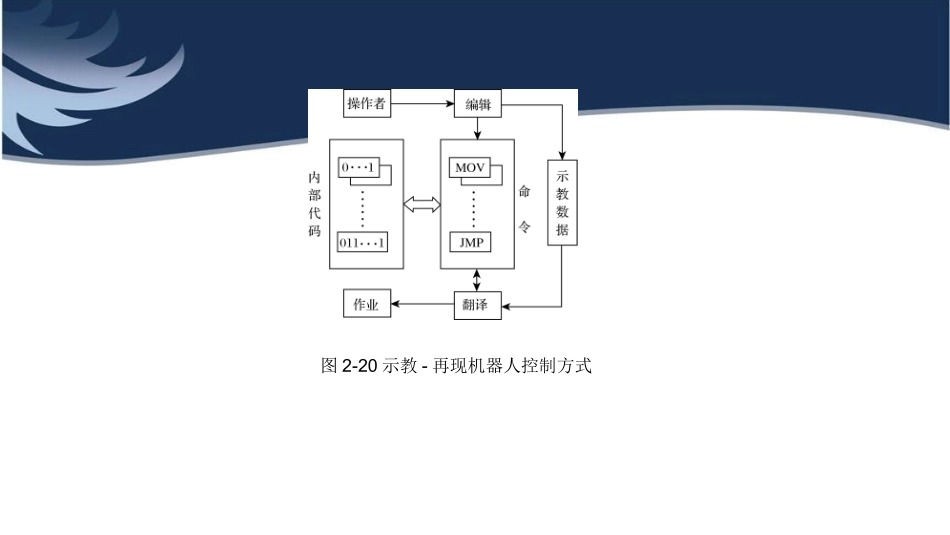
示教是一种机器人的编程方法,示教分为示教、存储、再现三个步骤,其原理如图2-20所示
图2-20示教-再现机器人控制方式•“示教”就是机器人学习的过程,在这个过程中,操作者要手把手教会机器人做某些动作
•“存储”就是机器人的控制系统以程序的形式将示教的动作记忆下来
ABB机器人存储器包含应用程序和系统模块两部分
存储器中只允许存在一个主程序,所有例行程序(子程序)与数据无论存在什么位置,全部被系统共享
因此,所有例行程序与数据除特殊定以外,名称不能重复
•机器人按照示教时记忆下来的程序展现这些动作,就是“再现”过程
•示教可分为在线示教方式和离线示教方式
•在线示教方式就是在现场直接对操作对象进行的一种编程方法,常用的有:•(1)人工引导示教•由有经验的操作人员移动机器人的末端执行器,计算机记忆各自由度的运动过程
其特点是简单,但精度受操作者的技能限制
•(2)辅助装置示教•对一些人工难以牵动的机器人,例如一些大功率或高减速比机器人,可以用特别的辅助装置帮助示教
•(3)示教盒示教•为了方便现场示教,一般工业机器人都配有示教盒,它相当于键盘,有回零、示教方式、数字、输入、编辑、启动、停止等键
•离线示教用于不便于现场操作,工作量大、精度低的情况,主要方法包括解析示教和任务示教
括解析示教就是将计算机辅助设计的数据直接用于示教,并利用传感技术进行必要的修正
任务示教就是指定任务,以及操作对象的位置、形状,由控制系统自动规划运动路径
任务示教是一种发展方向,具有较高的智能水平,目前仍处于研究中
6、ABB示教应用程序构成与基本命令•(1)应用程序由主模块和程序模块组成
•主模块(Mainmodule)包含主程序(Mainroutine)、程序数据(Pr