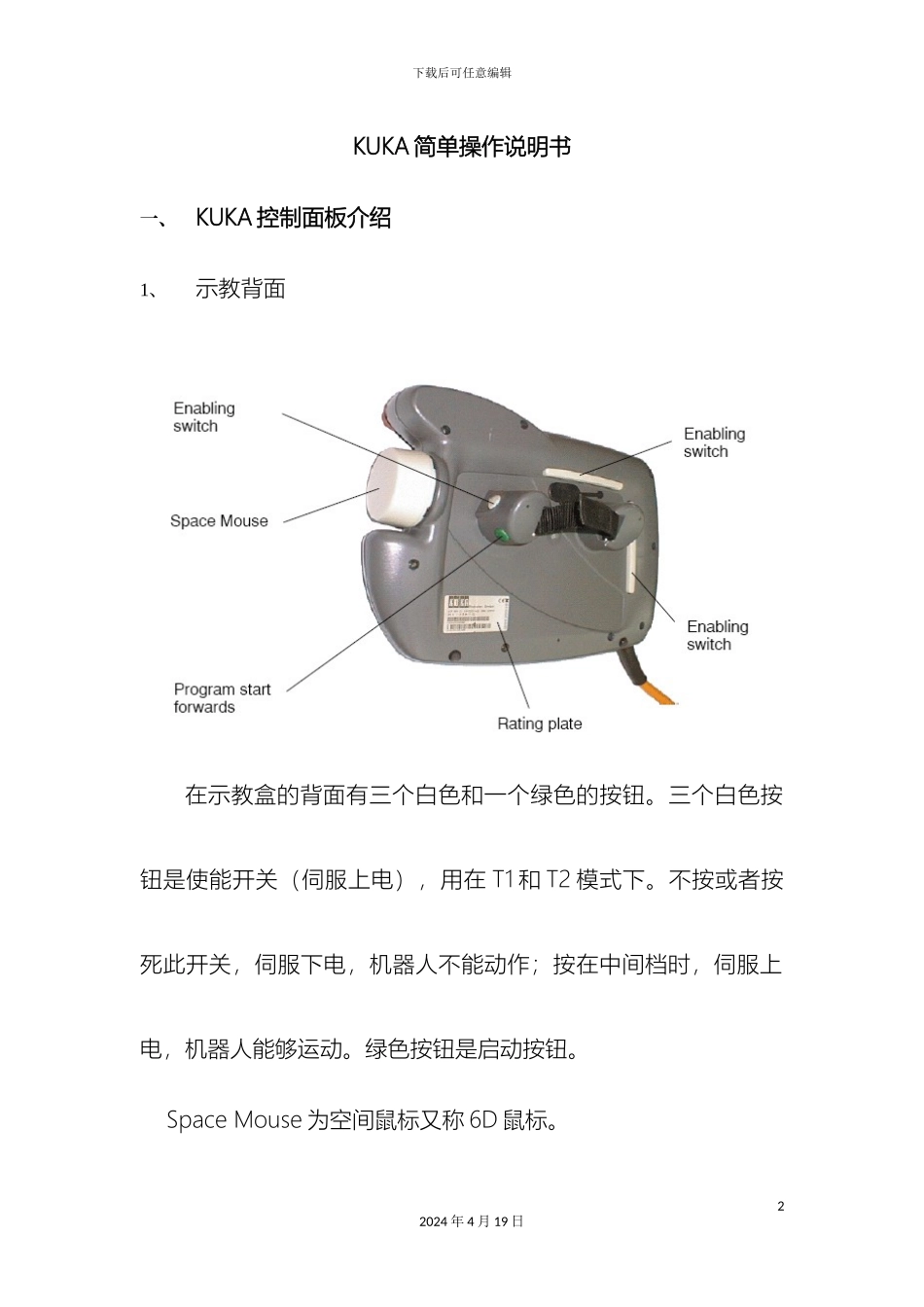
下载后可任意编辑KUKA 简单操作说明书12024 年 4 月 19 日下载后可任意编辑KUKA 简单操作说明书一、KUKA 控制面板介绍1、示教背面在示教盒的背面有三个白色和一个绿色的按钮
三个白色按钮是使能开关(伺服上电),用在 T1 和 T2 模式下
不按或者按死此开关,伺服下电,机器人不能动作;按在中间档时,伺服上电,机器人能够运动
绿色按钮是启动按钮
Space Mouse 为空间鼠标又称 6D 鼠标
22024 年 4 月 19 日下载后可任意编辑2、示教盒正面 急停按钮:这个按钮用于紧急情况时停止机器人
一旦这个按钮被按下,机器人的伺服电下,机器人立即停止
需要运动机器人时,首先要解除急停状态,32024 年 4 月 19 日下载后可任意编辑旋 转 此 按 钮 能够 抬 起 它 并 解除 急 停 状 态 ,然 后 按 功 能 键“确认(Ackn
)”,确认 掉 急 停 的 报警 信 息 才 能 运动机器人
伺服上电: 这个按钮给机 器 人 伺 服 上电
此 按 钮 必须在没有急停报警、安全门关闭、机器人处于自动模式(本地自动、外部自动)的情况下才有用
伺服下电:这个按钮给机器人伺服上电
42024 年 4 月 19 日下载后可任意编辑模式选择开关: T1 模式:手 动 运 行 机 器人 或 机 器 人 程序
在 手 动 运 行 机 器 人 或 机 器 人 程 序 时 , 最 大 速 度 都 为250mm/s
T2 模式:手动运行机器人或机器人程序
在 手 动 运 行 机 器 人 时 , 最 大 速 度 为250mm/s
在手动运行机器人程序时,最大速度为程序中设定的速度
本地自动:经过示教盒上的启动按钮能够使程序自动运行
外部自动:必须经过外部给启动信号才能自动执行程序
退出键: 能够退出状态窗口、菜单等
窗口转换键:52024 年 4 月 1