1 模糊 PID 控制原理与设计步骤模糊 PID 控制器以误差 e 和误差变化率 ec作为控制器的输入量,输入量经模糊化与模糊推理之后得出模糊控制器的输出值,PID 控制器根据模糊控制的输3
1PID 控制器性能分析u(k)=Ke+KTfe+5(ee)pklJjTk厂 1(3
1)为便于控制模型的搭建,由式(3
1)进行 z 变换得 PID 控制环节的传递函数为(3
2)其中,Kp、K、Kd分别为比例、积分与微分系数,T 为系统采样时间
PID 控制器参数 Kp,K,,Kd共同作用于被控系统,它们各自对系统的响应速度、超调量、稳定性及稳态精度等性能的影响分别为:比例系数匕:使控制系统快速动作,减小系统误差
Kp较大时,系统能快速响应,但 Kp过大时会产生超调,甚至破坏系统的稳定性;Kp过小时,会减弱控制器动作幅度,调节时间增长,使系统响应变得不理想
积分系数 K,:系统进入稳态阶段时会消除系统误差
K,较大时,系统稳态误差会很快变小,但在系统初始响应阶段 K,较大时,会使控制器产生积分饱和,从而破坏系统的稳定性;K,过小时,难以消除系统的稳态误差,不能确保较高的调节精度
出值对自身参数进行调节
本文所用模糊 PID 控制器的原理图如图 3
1 所示图 3
1 自适应模糊 PID 控制结构图Fig
1ThestructureofadaptivefuzzyPIDcontrolsystem在 PID 控制环节,离散 PID 控制算法为G(z)微分系数 Kd:提高系统的动态响应性能,会在系统响应过程中对偏差的变化进行提前预测,从而抑制偏差的变化
Kd过大时,会使系统响应作用减弱,从而使调节时间增长,而且会降低系统的抗干扰性能
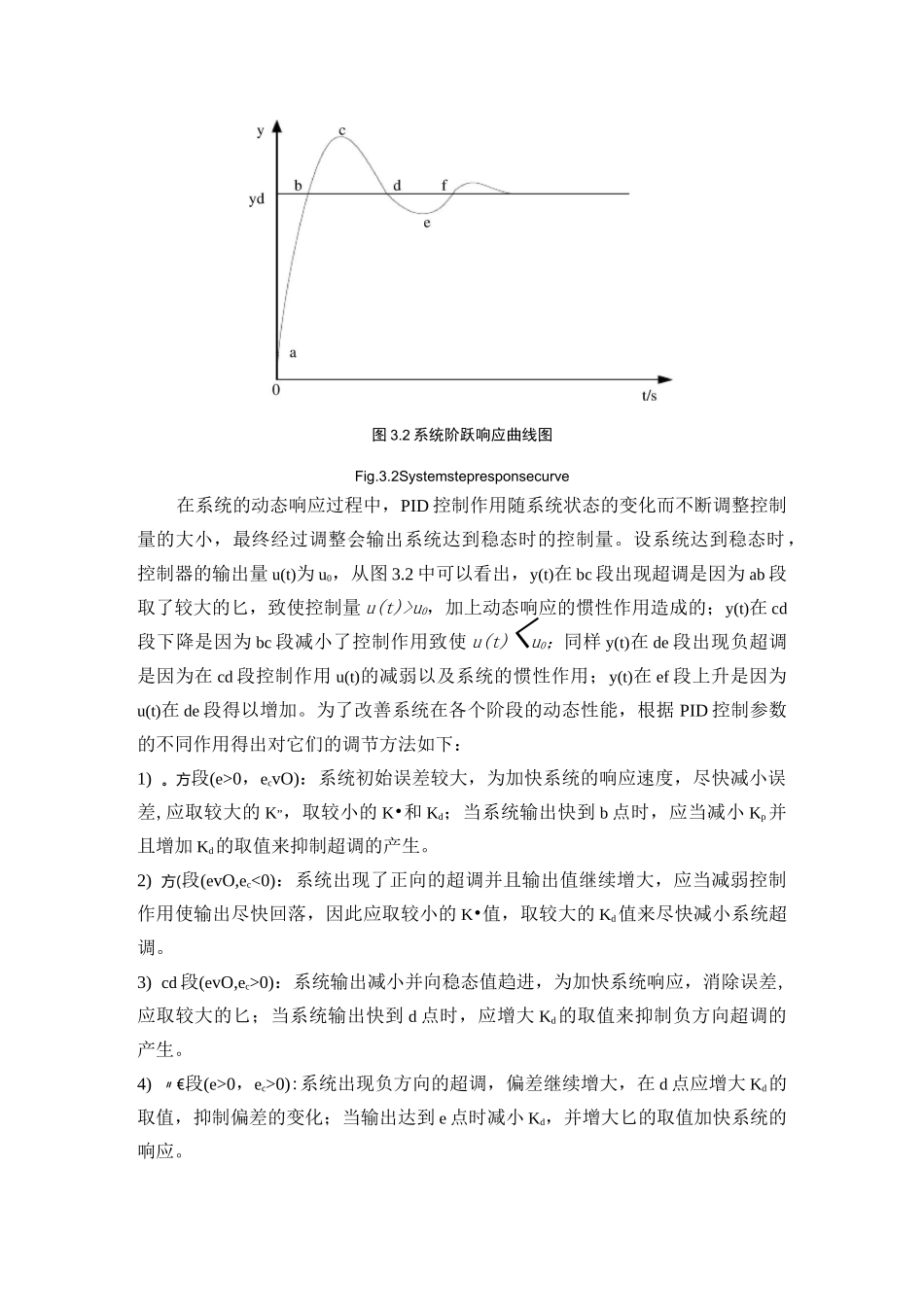
PID 控制参数的调节必须考虑不同时刻它们各自对系统性能的影响及相互之间的互联关系
通常情况下,比例控制环节用于加快系统响应速度,积分环节