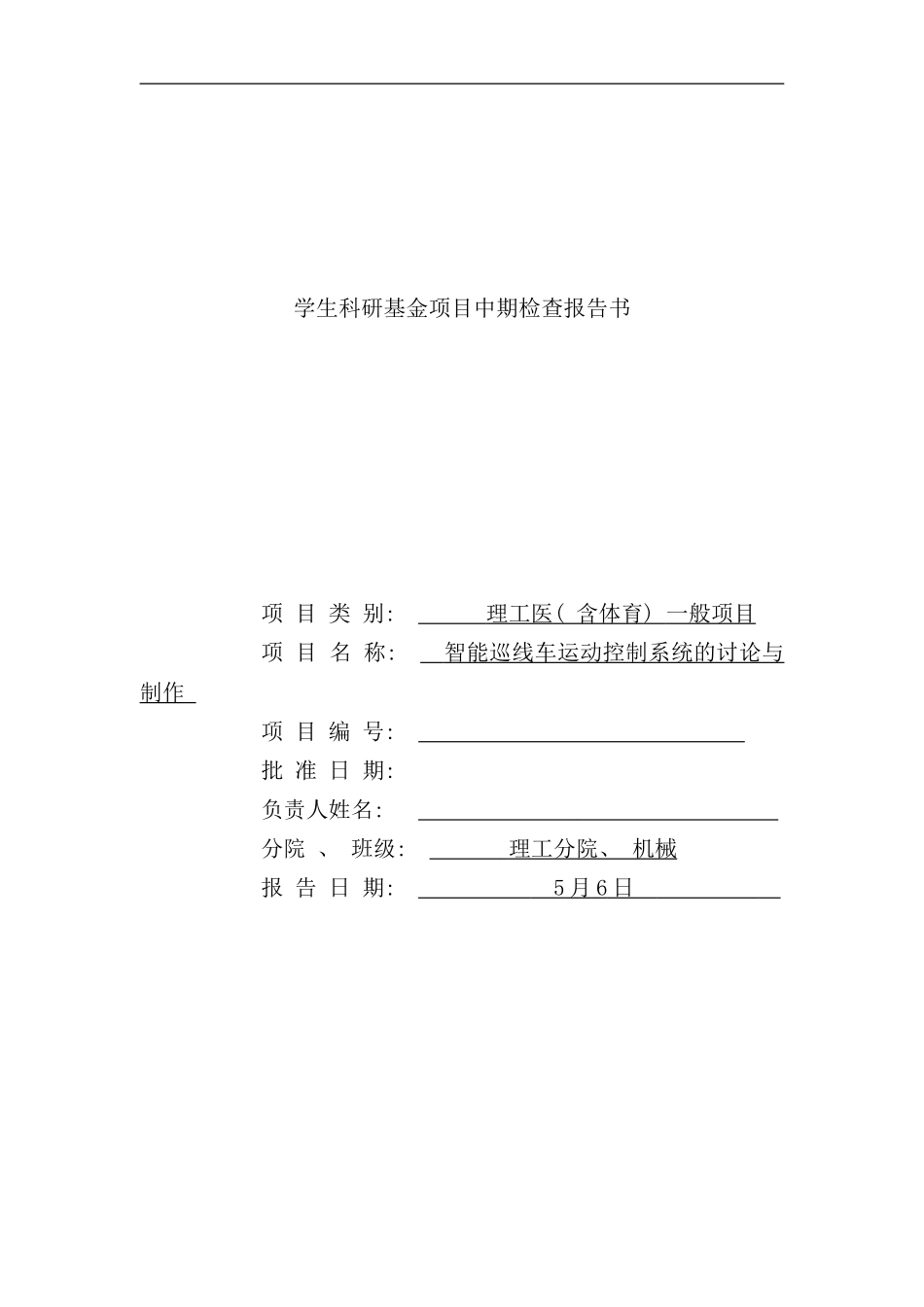
学生科研基金项目中期检查报告书项 目 类 别: 理工医 ( 含体育 ) 一般项目 项 目 名 称: 智能巡线车运动控制系统的讨论与 制作 项 目 编 号: 批 准 日 期: 负责人姓名: 分院 、 班级: 理工分院、 机械 报 告 日 期: 5 月 6 日 下载后可任意编辑阶 段 成 果论文或讨论报告( 篇) 等: 著作( 部) : 阶段性成果(成果形式为"讨论报告"者填"使用单位")序号成果名称成果形式作 者刊物、 年期( 出版社和出版日期或使用单位) 讨论工作进展情况( 讨论计划实施情况, 存在的问题, 能否按时完成等) 一、 计划实施情况实验时间: 1月11日——17日本周目标: 认识各个型号Arduino主控板并选择适合此次实验的主控板具体内容: 经过百度与淘宝卖家的沟通, 初步认识各个型号的主控板优缺点, 总结如下, 最后选择了Arduino MEGA2560作为我们的主控板, 因为各个工作区的外接插口较多拥有54路输出接口, 可插入许多传感器, 其次储存颗粒( EEPROM) 较大, 能够储存上万条语句, 最重要的一点是支持的函数库数据是最多的, 而且晶振规格较高, 可精确计时, 在Arduino系列里算是高配置的主控板, 也会对于未来省去不少的麻烦
以下是MEGA2560板( 右) 与Duemilanove板( 左) 的对比: 下载后可任意编辑实验时间: 1月17——19日本周目标: 认识了解小车动力系统的构造并搭建
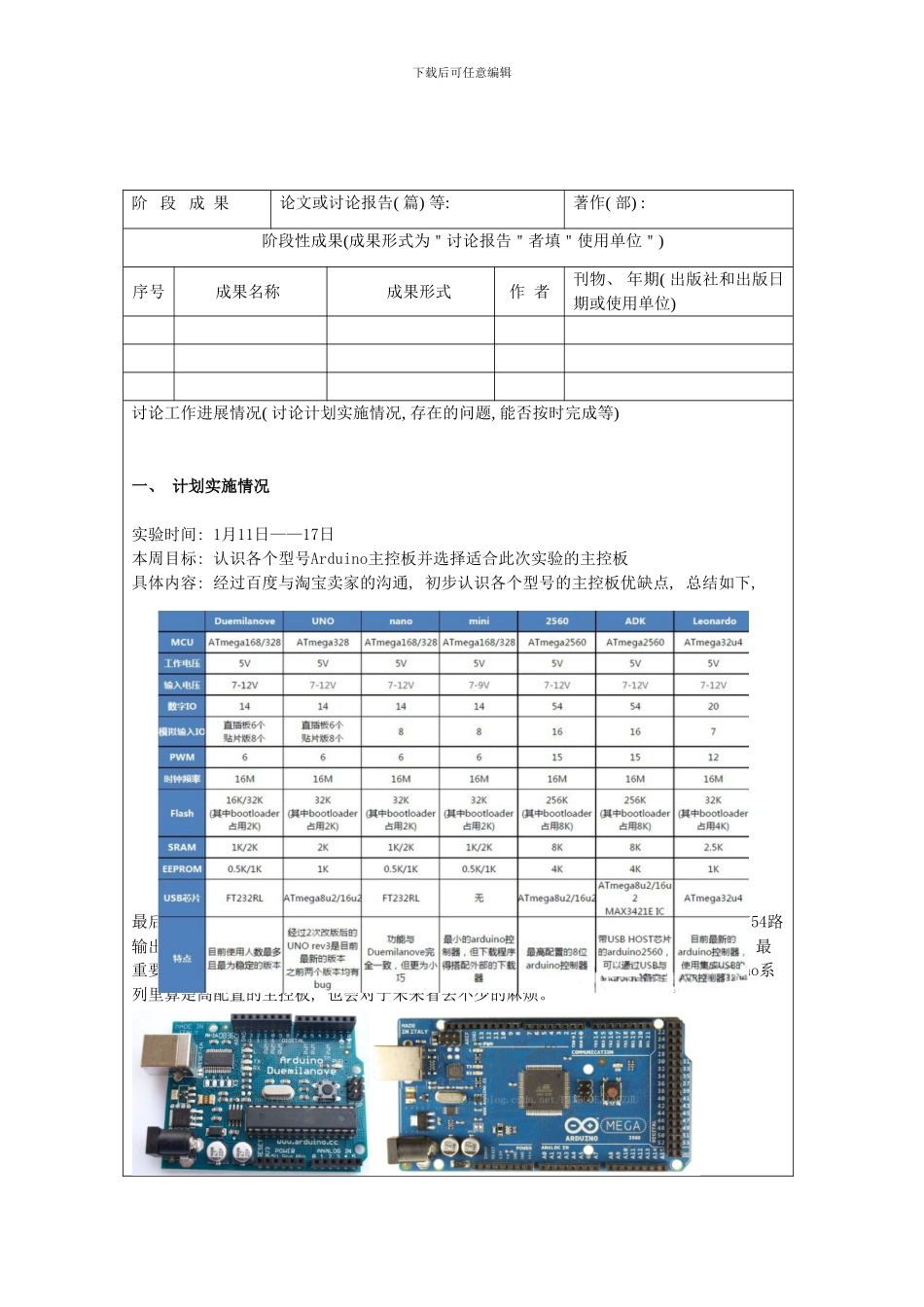
具体内容: 我们这周从百度上了解到许多小车动力系统的方案, 最后决定将电机电源与主控板电源分开供电( 也能够采纳主控板前加入降压装置, 可是为了防止电池输出电流过大而引起发热且需要一定的接线技巧否则接线处容易断开因此摒弃这一想法) , 原因是电机的额定电压远远大于主控板电压, 为防止烧坏主控板而设计; 主控板采纳松下的9V电池, 电机用的是12V