三维旋转矩阵的计算旋转矩阵( Rotation matrix)是在乘以一个向量的时候有改变向量的方向但不改变大小的效果的矩阵
旋转矩阵不包括反演,它可以把右手坐标系改变成左手坐标系或反之
所有旋转加上反演形成了正交矩阵的集合
在三维空间中,旋转变换是最基本的变换类型之一,有多种描述方式,如Euler角、旋转矩阵、旋转轴 /旋转角度、四元数等
本文将介绍各种描述方式以及它们之间的转换
旋转矩阵用一个 3 阶正交矩阵来表示旋转变换,是一种最常用的表示方法
容易证明,3阶正交阵的自由度为3
注意,它的行列式必须等于1,当等于 -1 的时候相当于还做了一个镜像变换
Euler角根据 Euler 定理,在三维空间中,任意一种旋转变换都可以归结为若干个沿着坐标轴旋转的组合,组合的个数不超过三个并且两个相邻的旋转必须沿着不同的坐标轴
因此,可以用三个沿着坐标轴旋转的角度来表示一个变换,称为Euler 角
旋转变换是不可交换的,根据旋转顺序的不同,有12 种表示方式,分别为: XYZ、XZY、XYX、XZX、YXZ、YZX、YXY、YZY、ZXY、ZYX、ZXZ、ZYZ,可以自由选择其中的一种
对于同一个变换,旋转顺序不同,Euler 角也不同,在指定 Euler 角时应当首先约定旋转顺序
1 Euler 角 转化为 旋转矩阵不妨设先绕 Z 轴旋转 γ,再绕 Y 轴旋转 β,最后绕 X 轴旋转 α,即旋转顺序为XYZ,旋转矩阵3
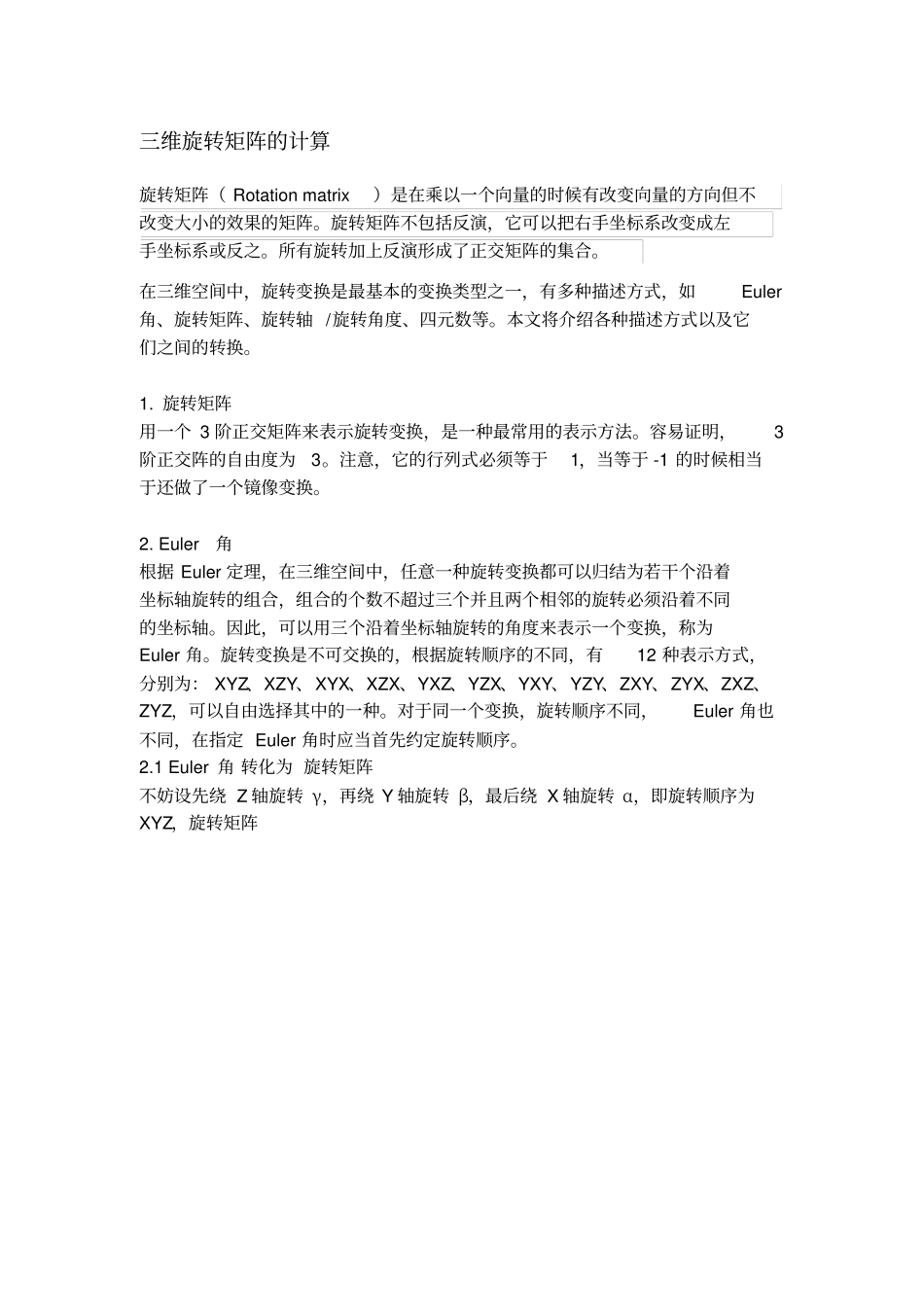
旋转轴 / 旋转角度用旋转轴的方向向量n 和旋转角度 θ 来表示一个旋转,其中θ >0表示逆时针旋转
1 旋转轴 / 旋转角度 转化为 旋转矩阵设 v 是任意一个向量,定义如下图所示这样,我们建立了一个直角坐标系
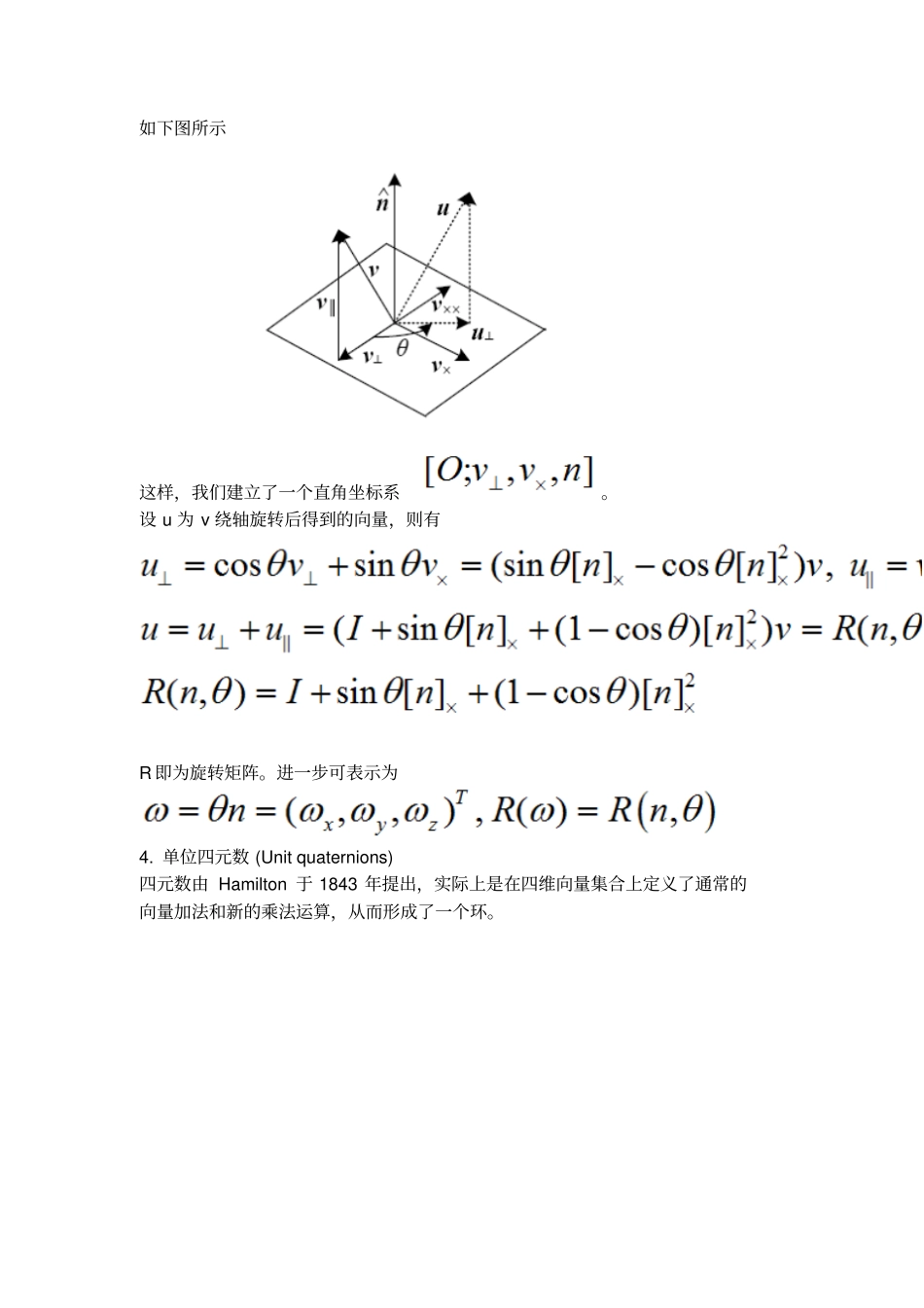
设 u 为 v 绕轴旋转后得到的向量,则有R 即为旋转矩阵
进一步可表示为4
单位四元数 (Unit quaternions)四