第 一 章1-1 图 1-2 是液位自动控制系统原理示意图
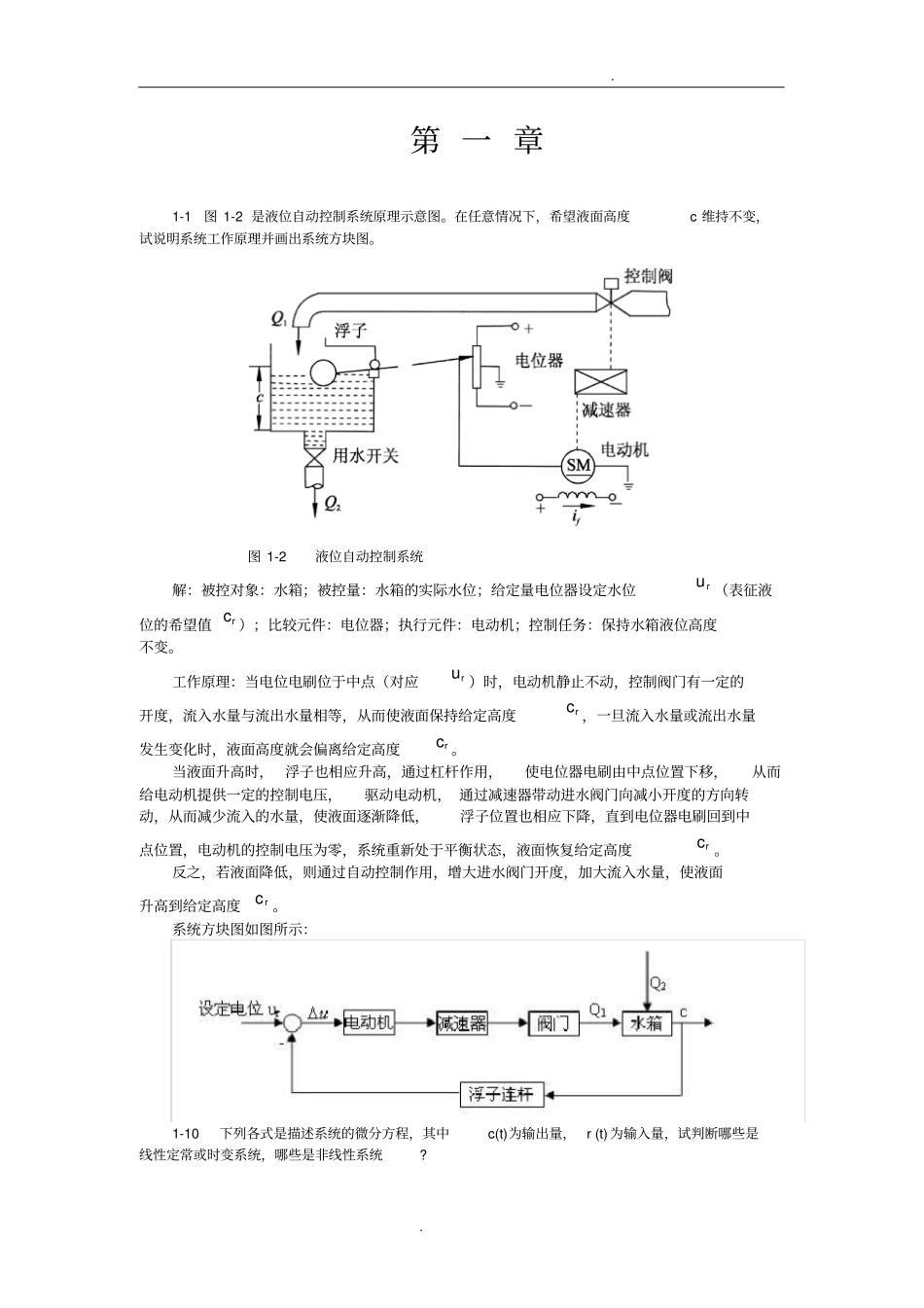
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图
图 1-2 液位自动控制系统解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位ru (表征液位的希望值rc );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变
工作原理:当电位电刷位于中点(对应ru )时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度rc ,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度rc
当液面升高时, 浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机, 通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度rc
反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度rc
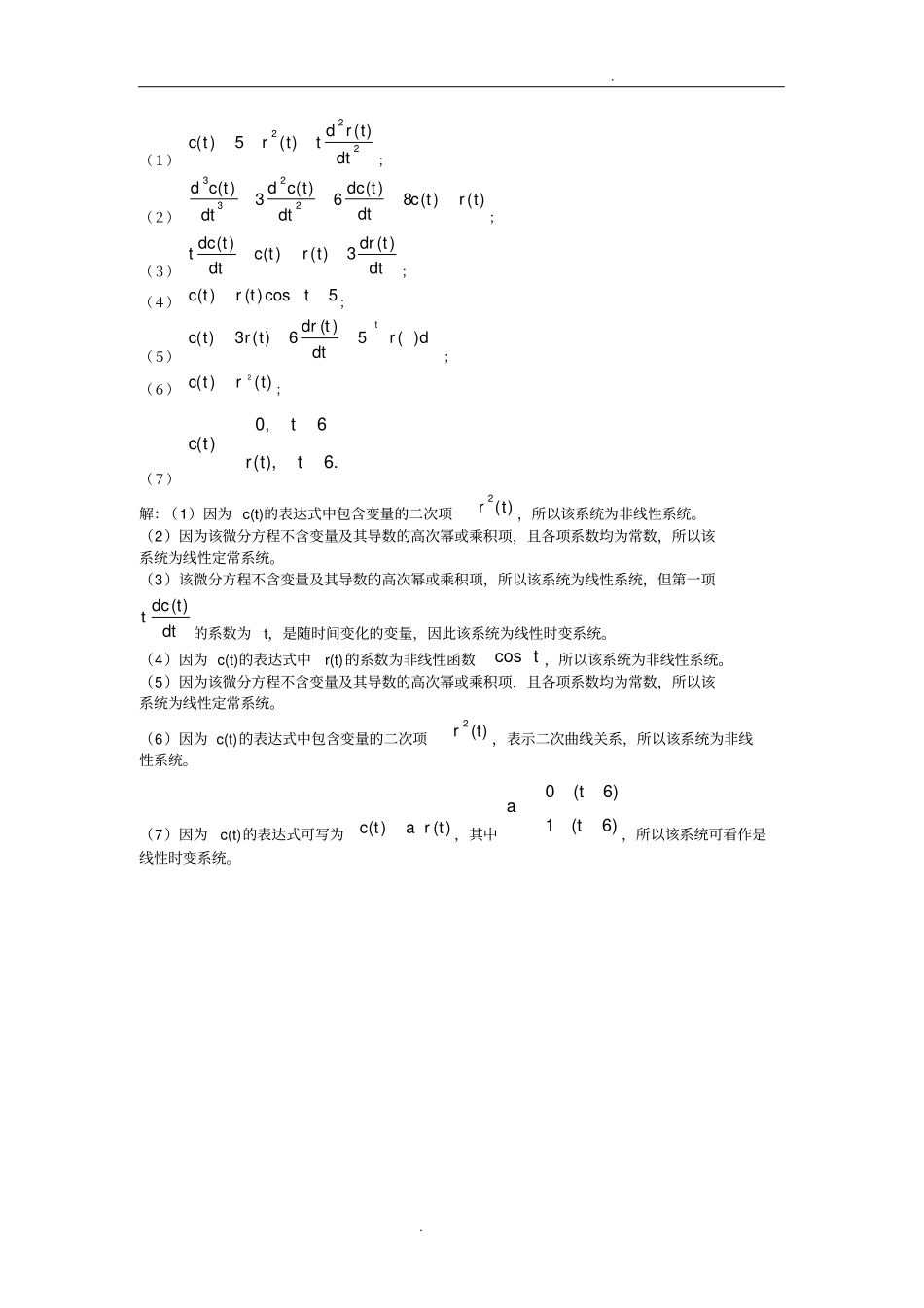
系统方块图如图所示:1-10 下列各式是描述系统的微分方程,其中c(t)为输出量, r (t) 为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统
(1)222)()(5)(dttrdttrtc;(2))()(8)(6)(3)(2233trtcdttdcdttcddttcd;(3)dttdrtrtcdttdct)(3)()()(;(4)5cos)()(ttrtc;(5)tdrdttdrtrtc)(5)(6)(3)(;(6))()(2 trtc;(7)
6),(6,0)(ttrttc解:(1)因为 c(t)的表达式中包含变量的二次项2( )rt ,所以该系统为非线性系统
(2)因为该微分方程不含变量及其导数的高次幂或乘积项