1 实验一 MATLAB 控制工具箱的应用及线性系统的运动分析 实验日期 2013 年5 月21 日 成绩:______ 批阅教师签字 1
实验目的 ⑴ 学习掌握MATLAB控制工具箱中的基本命令 ⑵ 掌握线性系统的运动分析方法 2
实验环境 MATLAB6
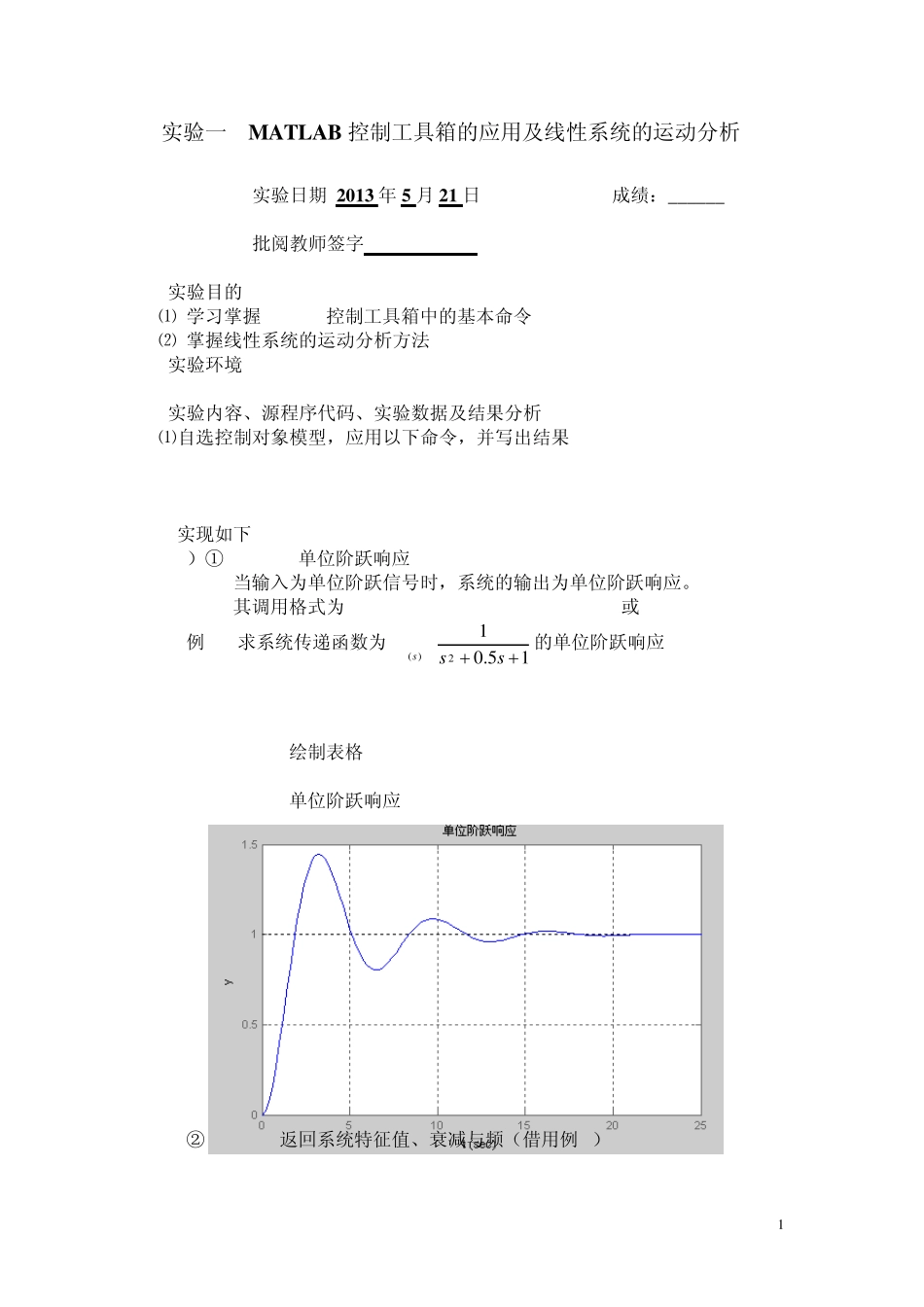
实验内容、源程序代码、实验数据及结果分析 ⑴自选控制对象模型,应用以下命令,并写出结果 1) step, damp, pzmap, rlocus, rlocfind, bode, margin, nyquist 2) tf2ss, ss2tf, tf2zp, zp2ss 3) ss2ss, Jordan, canon, eig 实现如下: 1)① step 单位阶跃响应 当输入为单位阶跃信号时,系统的输出为单位阶跃响应
其调用格式为: [y, x, t] = step(num, den, t) 或 step(num, den) 例 1: 求系统传递函数为 W)(s =15
012ss的单位阶跃响应 num = [1]; den = [1 0
5 1]; sys = tf(num,den); step(sys) grid; %绘制表格 xlabel('t'); ylabel('y'); title('单位阶跃响应'); ② damp 返回系统特征值、衰减与频(借用例 1) num = [1]; den = [1 0
5 1]; 2 sys = tf(num,den); damp(sys) 其输出结果为: Eigenvalue Damping Freq
(rad/s) -2
50e-001 + 9
68e-001i 2
50e-001 1
00e+000 -2
50e-001 - 9
68e-001i 2
50e-001 1
00e+000 ③