第五章 规则自调整模糊控制 5
1 简单的模糊控制器 在大量的工业被控对象和被控对程中,消除被控对象的输出偏差问题,是很普遍的一类控制问题
由于被控对象的精确模型难以建立,不便利用经典的控制方法进行控制,而采用简单的模糊控制器,却能得到良好的控制效果
一、模糊控制器的结构
简单的FC 控制器是一个二维模糊控制器,其输入变量为误差E 及误差的变化 EC,输出变量为控制量U
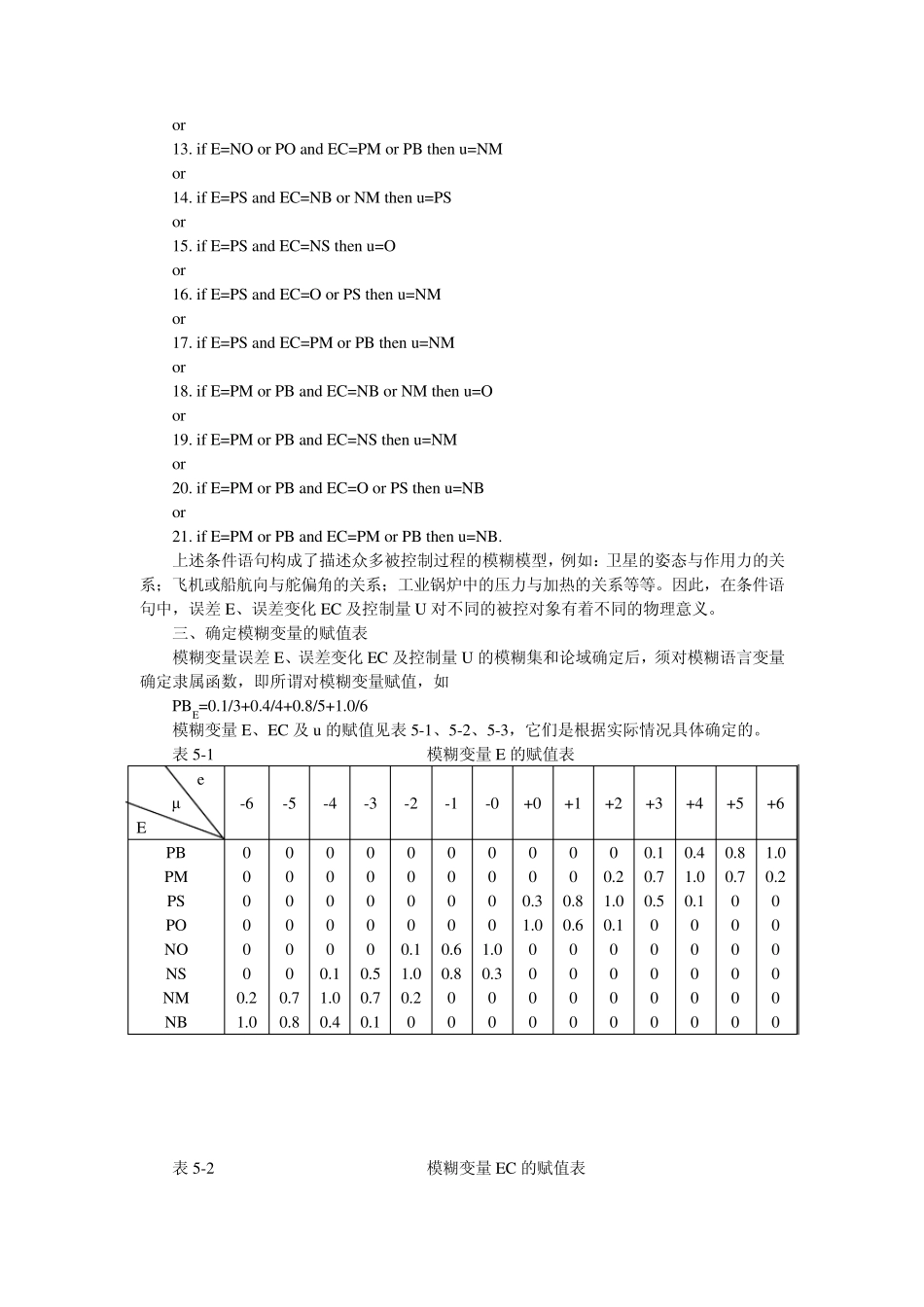
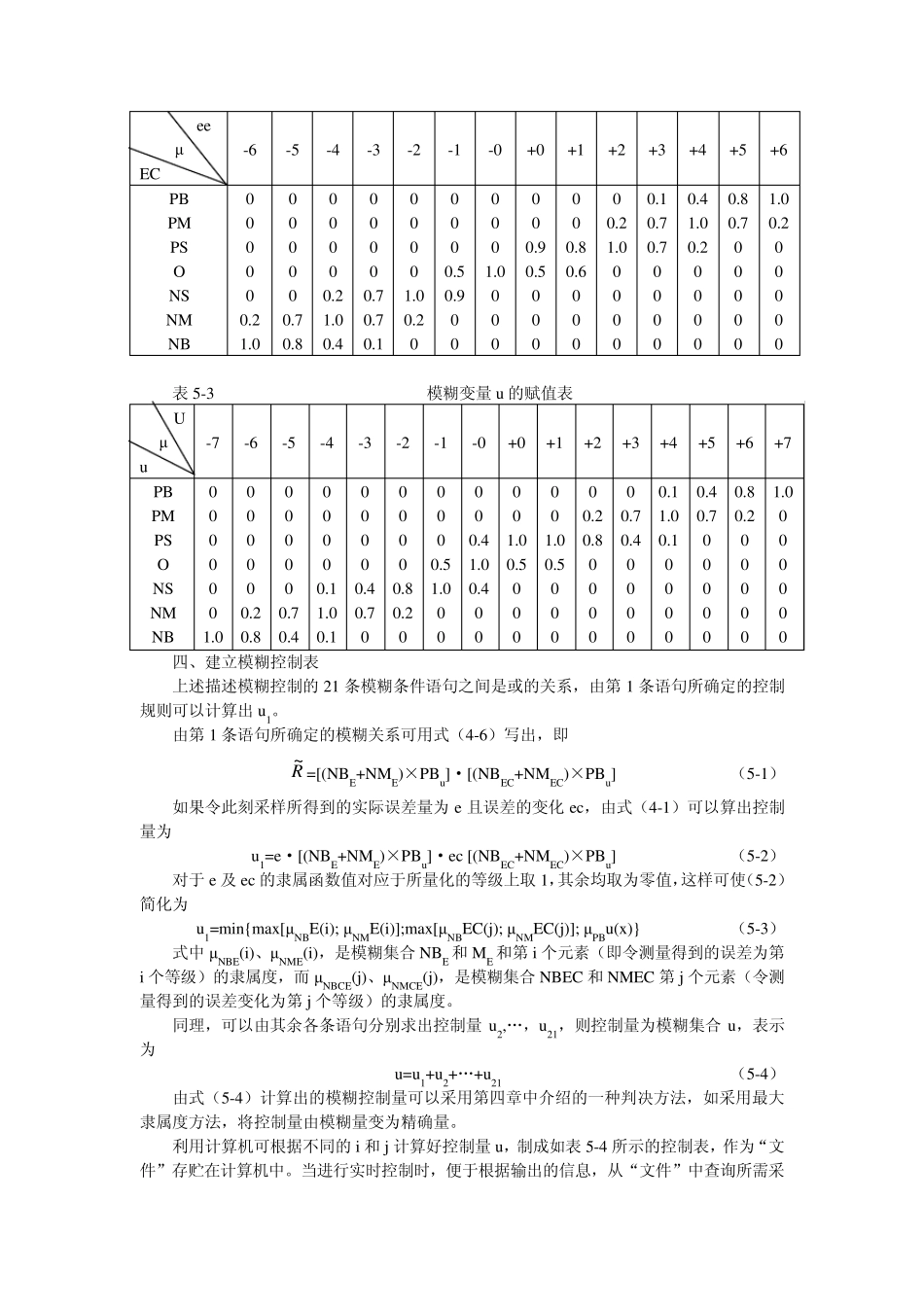
对误差E,误差变化率 EC 及控制量U 的模糊集及其论域定义如下: EC 和U 的模糊集均为 {NB,NM,NS,O,PS,PM,PN} E 的模糊集为 {NB,NM,NS,NO,PO,PS,PM,PB } E 和EC 的论域均为 {-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} U 的论域为 {-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7} 上述的误差模糊集选取八个元素,区别 NO 和PO,主要是为了提高稳态精度
二、模糊控制规则
第四章中的表 4-1 所描述的控制规则,正是一类根据系统输出的误差及误差变化趋势来消除误差的模糊控制规则
这个规则可用以下 21 条模糊语句来描述: 1
if E=NB or NM and EC=NB or NM then u=PB or 2
if E=NB or NM and EC=NS or O then u=PB or 3
if E=NB or NM and EC=PS then u=PM or 4
if E=NB or NM and EC=PM or PB then u=O or 5
if E=NS or EC=NB or NM then u=PM or 6
if E=NS or EC=NS or O then u=PM or 7
if E=NS and EC=PS then u=NS or 8