1 6-SPS 与6-PSS 并联机构的运动与受力分析 与传统的串联机构相比,并联机构的运动与受力分析具有反解容易而正解复杂的特点
为了解并联机构的这些特点,本文针对6-SPS 和6-PSS 两种6 自由度并联机构的运动和受力特性进行了简单推导,得出一些关于求解矩阵的有趣结论
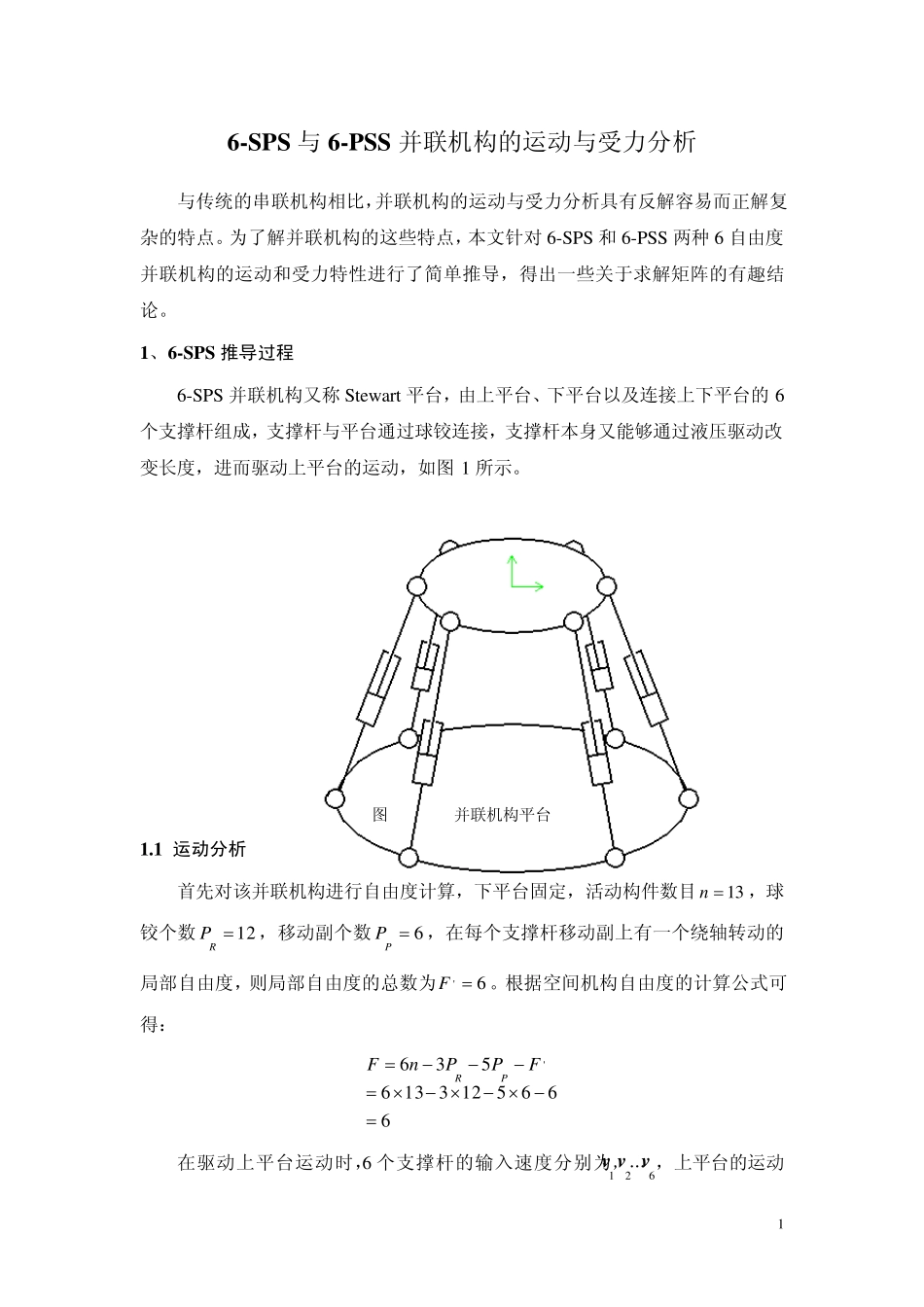
1、6-SPS 推导过程 6-SPS 并联机构又称Stew art 平台,由上平台、下平台以及连接上下平台的6个支撑杆组成,支撑杆与平台通过球铰连接,支撑杆本身又能够通过液压驱动改变长度,进而驱动上平台的运动,如图 1 所示
图 1 6-SPS并联机构平台 1
1 运动分析 首先对该并联机构进行自由度计算,下平台固定,活动构件数目13n,球铰个数12RP,移动副个数6PP,在每个支撑杆移动副上有一个绕轴转动的局部自由度,则局部自由度的总数为6' F
根据空间机构自由度的计算公式可得: 6665123136536'FPPnFPR 在驱动上平台运动时,6 个支撑杆的输入速度分别为621vvv
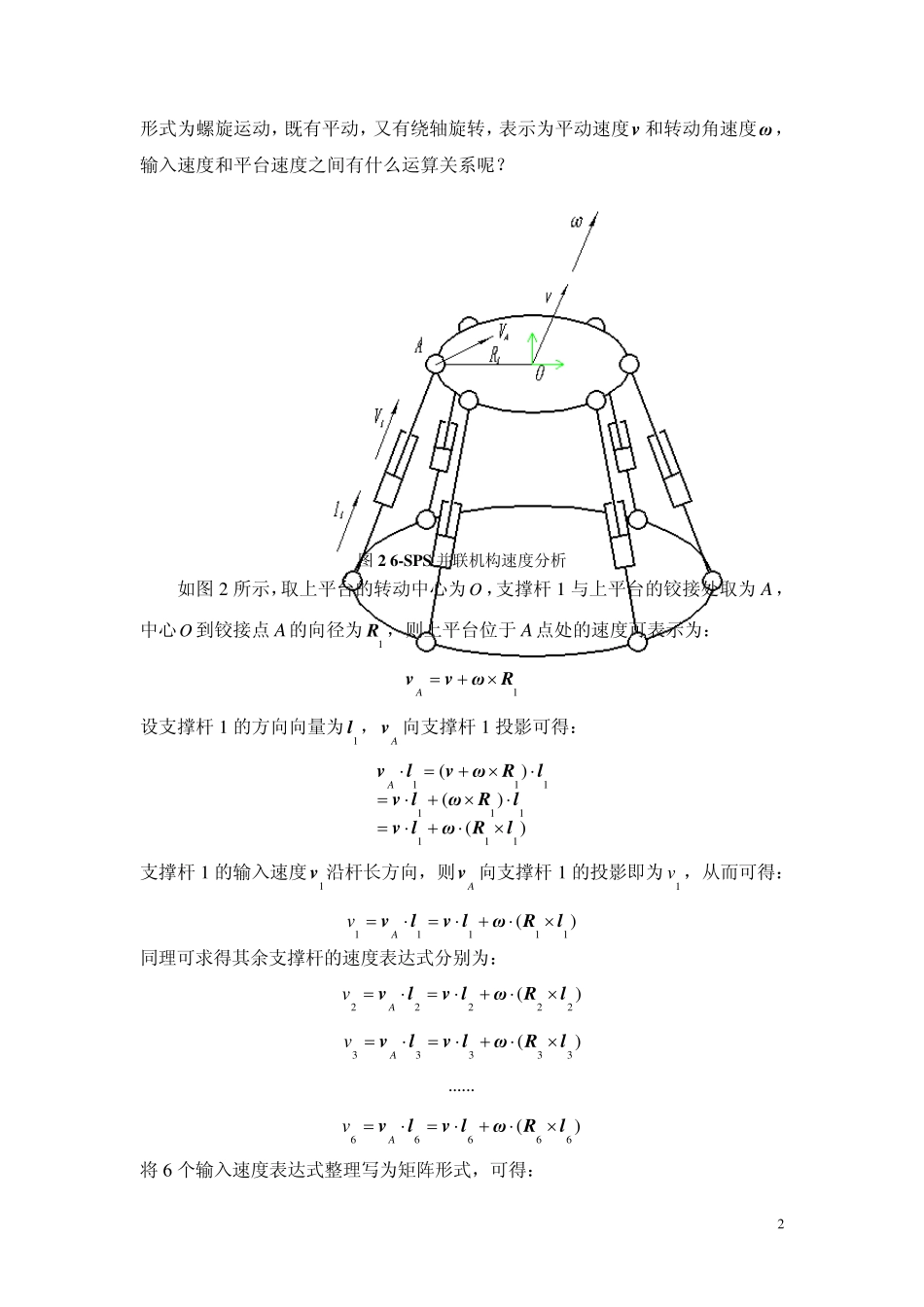
,,上平台的运动 2 形式为螺旋运动,既有平动,又有绕轴旋转,表示为平动速度v 和转动角速度ω,输入速度和平台速度之间有什么运算关系呢
图2 6-SPS 并联机构速度分析 如图2 所示,取上平台的转动中心为O ,支撑杆 1 与上平台的铰接处取为A,中心O 到铰接点 A的向径为1R ,则上平台位于 A点处的速度可表示为: 1RωvvA 设支撑杆 1 的方向向量为1l ,Av向支撑杆 1 投影可得: )()()(111111111lRωlvlRωlvlRωvlvA 支撑杆 1 的输入速度1v 沿杆长方向,则Av向支撑杆 1 的投影即为1v,从而可得: )(11111lRωlvlvAv 同理可求得其余支撑杆的速度