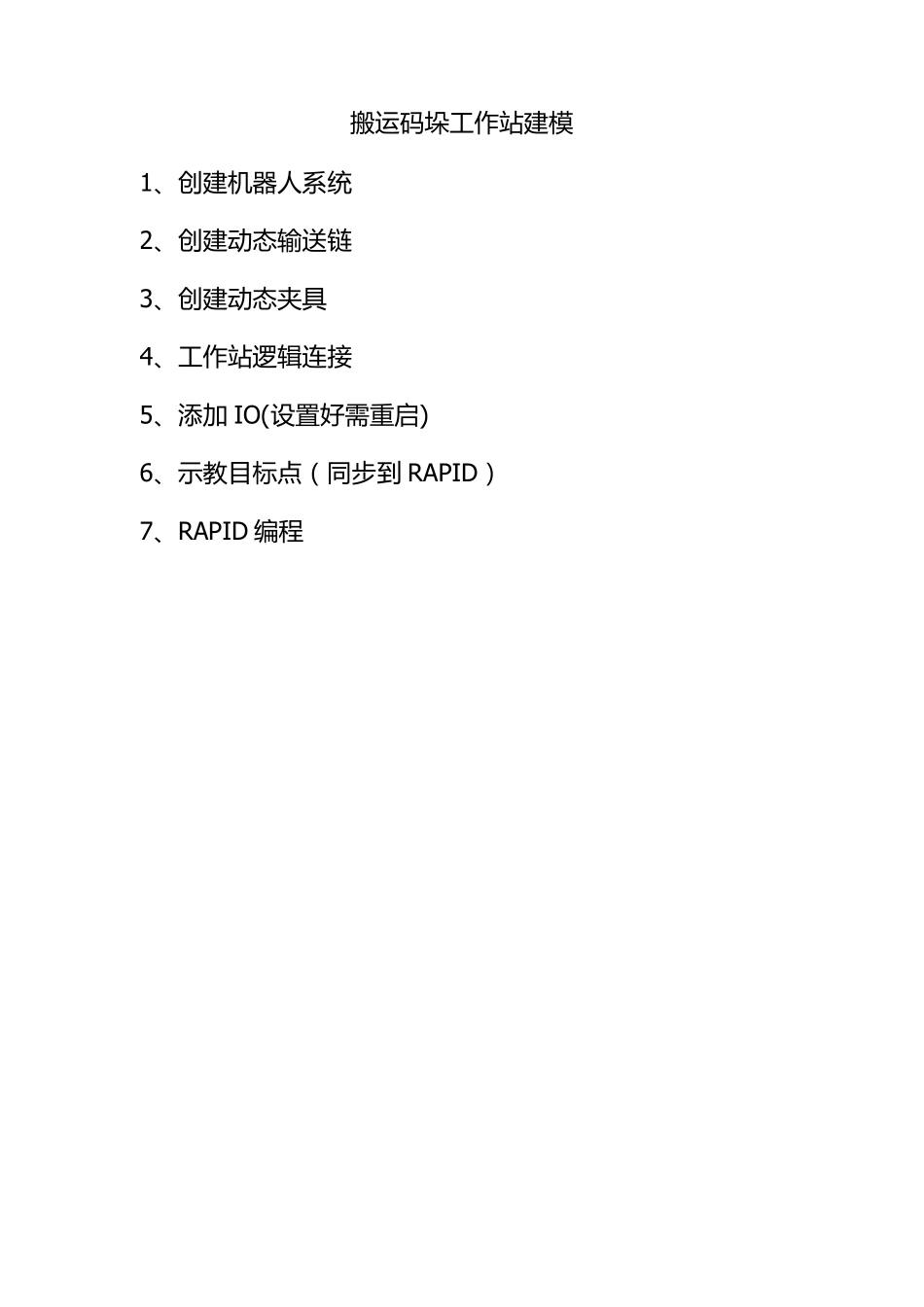
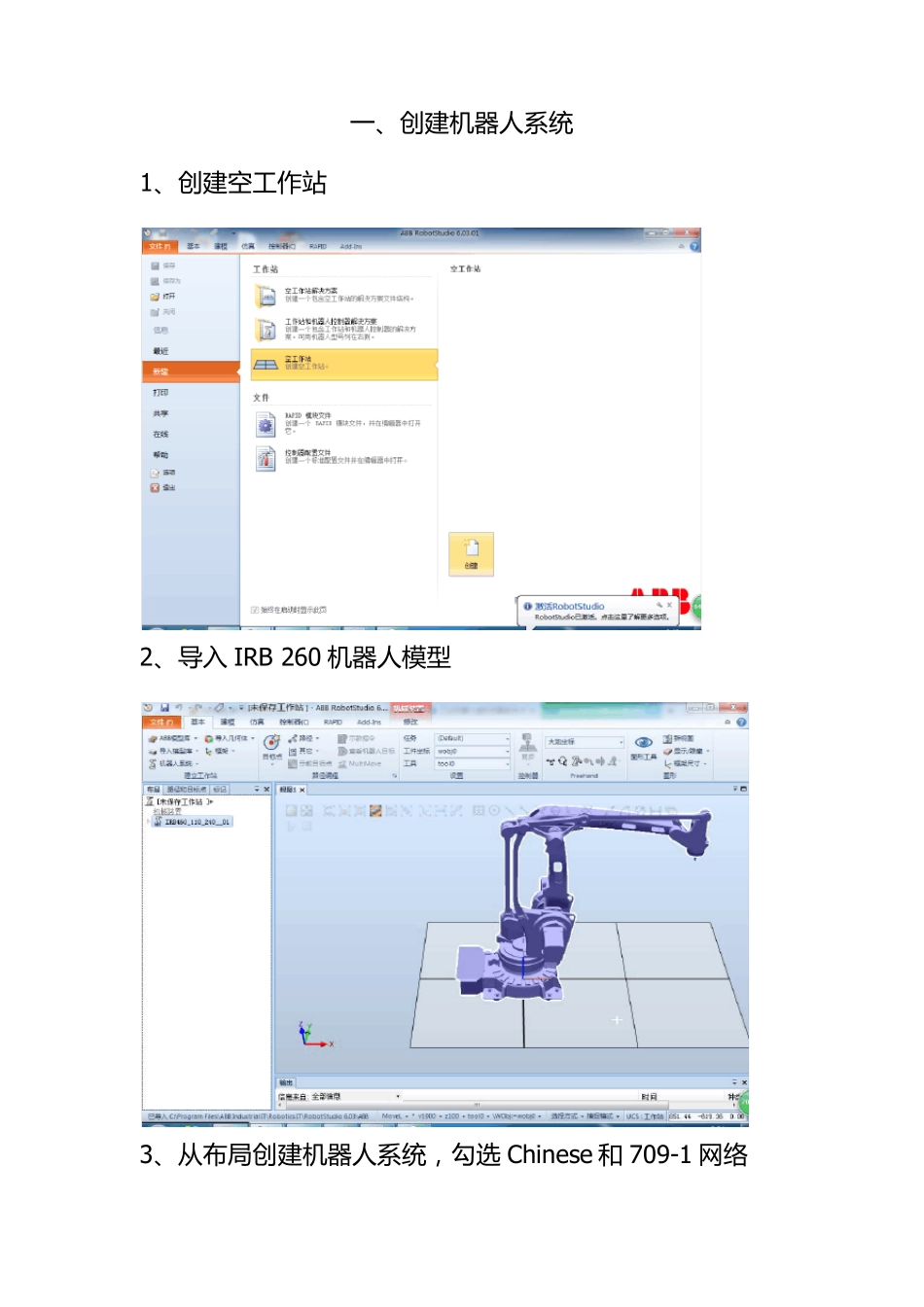
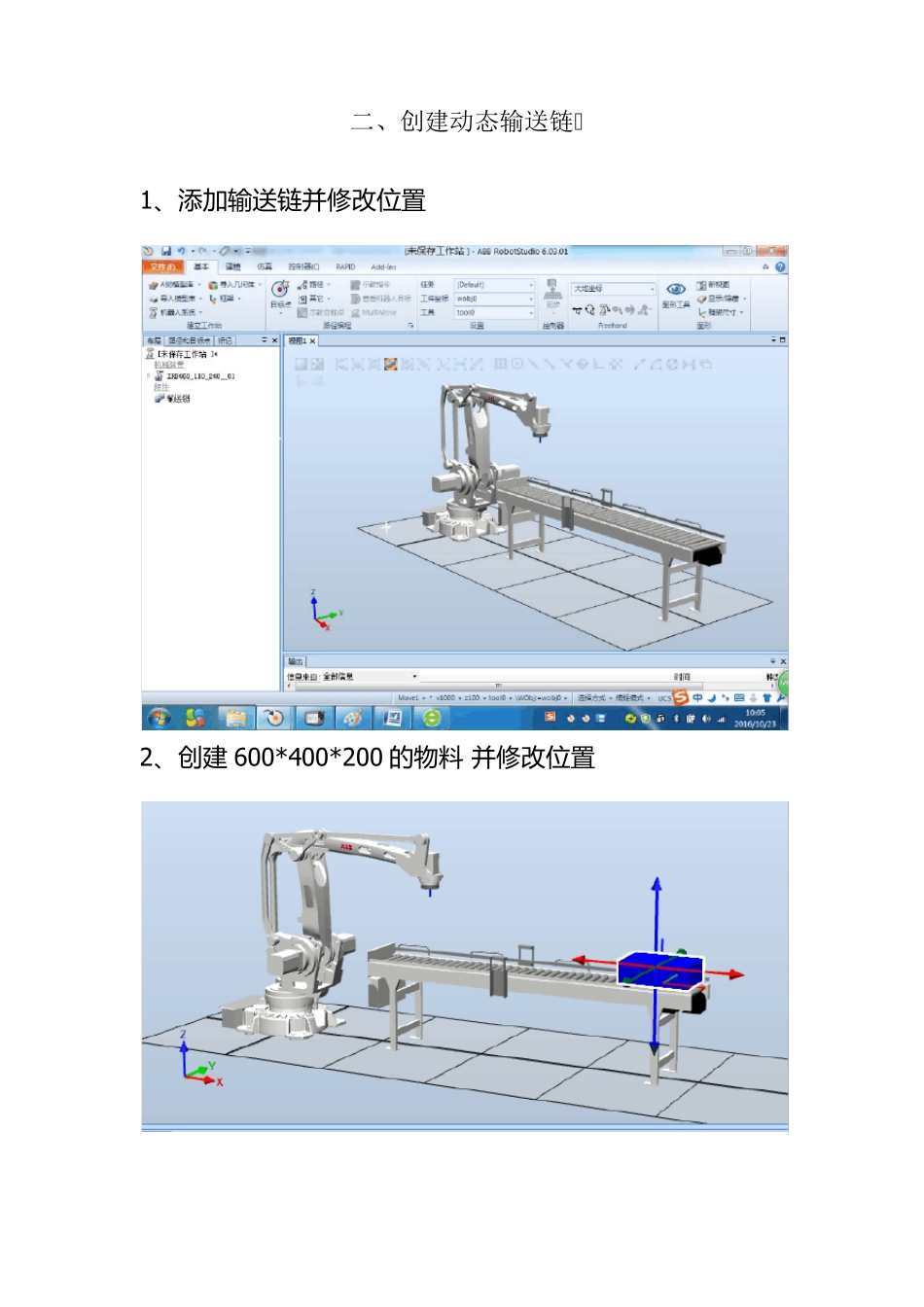
搬 运 码 垛 工 作 站 建 模 1、创建 机器人系统 2、创建 动态输送链 3、创建 动态夹具 4、工 作 站 逻辑连接 5、添加 IO(设置好需重启) 6、示教目标点(同步到 RAPID) 7、RAPID 编程 一 、创建机器人系统 1、创建空工作站 2、导入 IRB 260 机器人模型 3、从布局创建机器人系统,勾选 Chinese 和 709-1 网络 二、创建动态输送链 1、添加输送链并修改位置 2、创建 600*400*200 的物料 并修改位置 3、添加一个 smart 组件 4、添加 sou rce 组件 5、设置物料本地原点 6、添加 LINEMOVER 和 QUEUE 组件 7 设置 LINEMOVER 属性 8、添加面传感器组件 9、设置输送链不能被传感器检测 10、设置 SC_输送链的属性连接 11、设置信号连接 12、添加信号处理组件,用于检测传感器下降沿 13、传感器下降沿触发 source 进行 copy 14、传感器与 SC 输送链的输出联系 15、添加仿真开始结束组件,用于激活传感器 16、添加置位复位组件,对仿真开始结束信号进行保持 17、 18、进 行 仿 真 设 定 选 择 SC——输送链 进 行 验证 三、创建动态夹具 1、先制作一个吸盘模型,然后设置成工具,并安装到机器人法拉盘 2、添加 SMART 组件 3、添加 ATTACHER 和 DETACHER 组件 4、设置属性 5、添加一个线传感器组件 6、线传感器设置属性 7、设置吸盘工具不能被传感器检测 8、把线传感器安装到吸盘(不更新位置,保持当前位置) 9、设置属性连接 10、添加信号及连接 11、添加信号处理取非和锁定组件 12、继续信号连接 13、添加一个示教物料 14、应用手动线性验证 SC_工具 四、工作站逻辑连接 五、参考代码 MODULE MainMoudle PERS tooldata tGrip:=[TRUE,[[0,0,200],[1,0,0,0]],[25,[0,0.00109327,116.889],[1,0,0,0],0,0,0]]; ! 吸 盘 工 具数据 PERS loaddata LoadEmpty:=[0.01,[0,0,1],[1,0,0,0],0,0,0]; PERS loaddata LoadFull:=[40,[0,0,50],[1,0,0,0],0,0,0]; ! 有效载荷数据 PERS robtarget pHome:=[[1620.00,-0.00,1331.59],[1.27986E-06,-0.707107,-0.707107,1.27986E-06],[0,0,1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; ! 基准点 PERS robtarget pActualPos:=[[1620,-1.87531E-14,1331.59],[1.27986E-06,-0.707107,-0.707107,1.27986E-06],[0,0,1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; ! 实 际 点 ...