1 ADAMS/Controls使用实例 本实例以 MATLAB 作为外部控制程序,以偏心连杆模型为例,讲解 ADAMS 与 MATLAB 的联合仿真过程
主要包括创建机械系统模型、模型参数设置、建立 MATLAB 控制模型以及结果后处理四个步骤
机械模型建立、模型参数设置这两步为了导出一个可在 MATLAB 软件 Simulink中使用的模块,这个模块包含了所建立 ADAMS 模型的信息参数,并有输入输出接口
利用这个模块在MALTAB中建立控制系统,就可以控制 ADAMS 模型,在仿真结束后,可以直接在MATLAB中得到所需的数据结果进行后处理
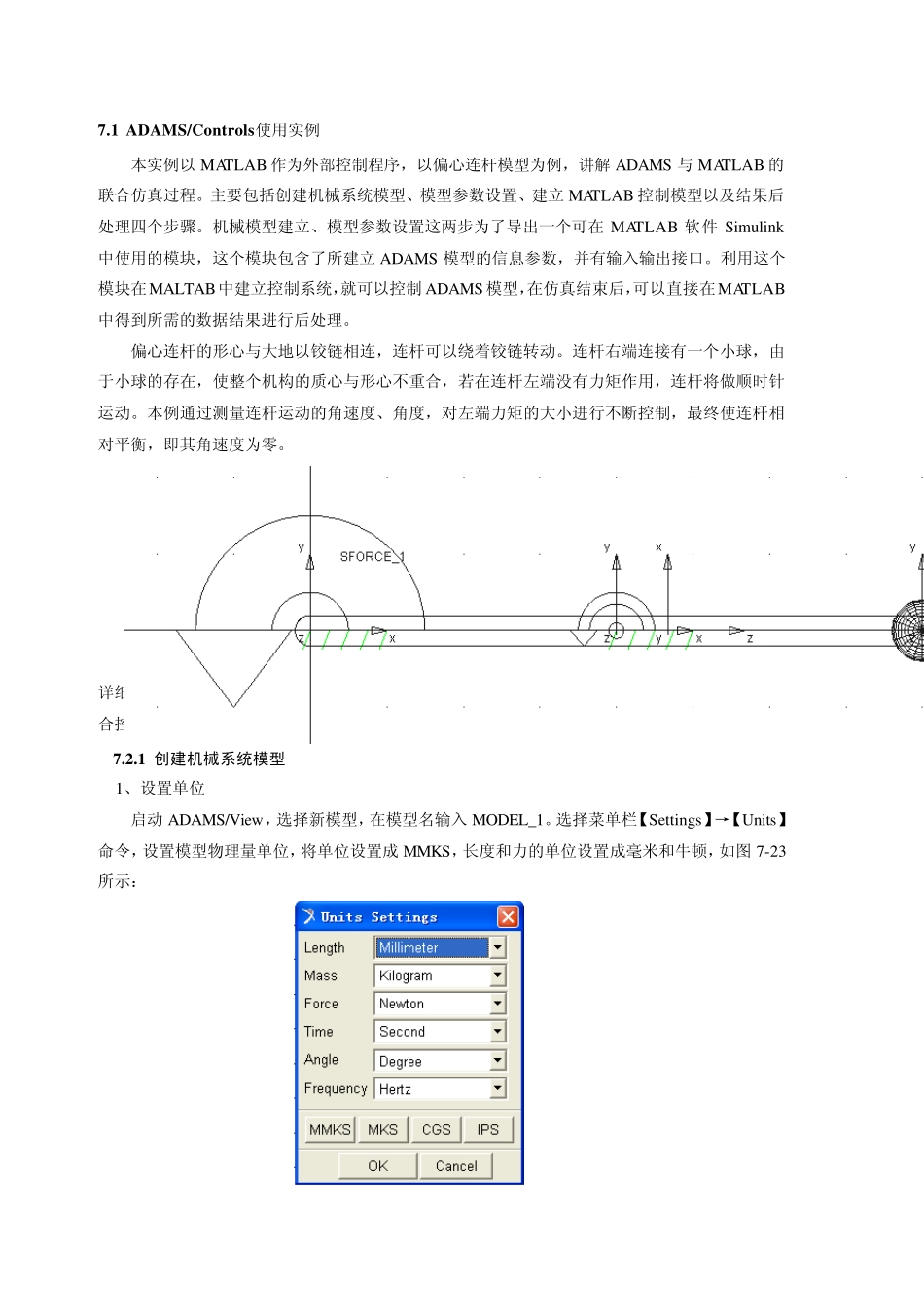
偏心连杆的形心与大地以铰链相连,连杆可以绕着铰链转动
连杆右端连接有一个小球,由于小球的存在,使整个机构的质心与形心不重合,若在连杆左端没有力矩作用,连杆将做顺时针运动
本例通过测量连杆运动的角速度、角度,对左端力矩的大小进行不断控制,最终使连杆相对平衡,即其角速度为零
图7-22 偏心连杆模型 以下将详细介绍联合仿真的详细步骤
通过本实例的学习,能够详细了解 ADAMS 软件与 MATLAB 联合控制的使用方法
1 创建机械系统模型 1、设置单位 启动 ADAMS/View ,选择新模型,在模型名输入 MODEL_1
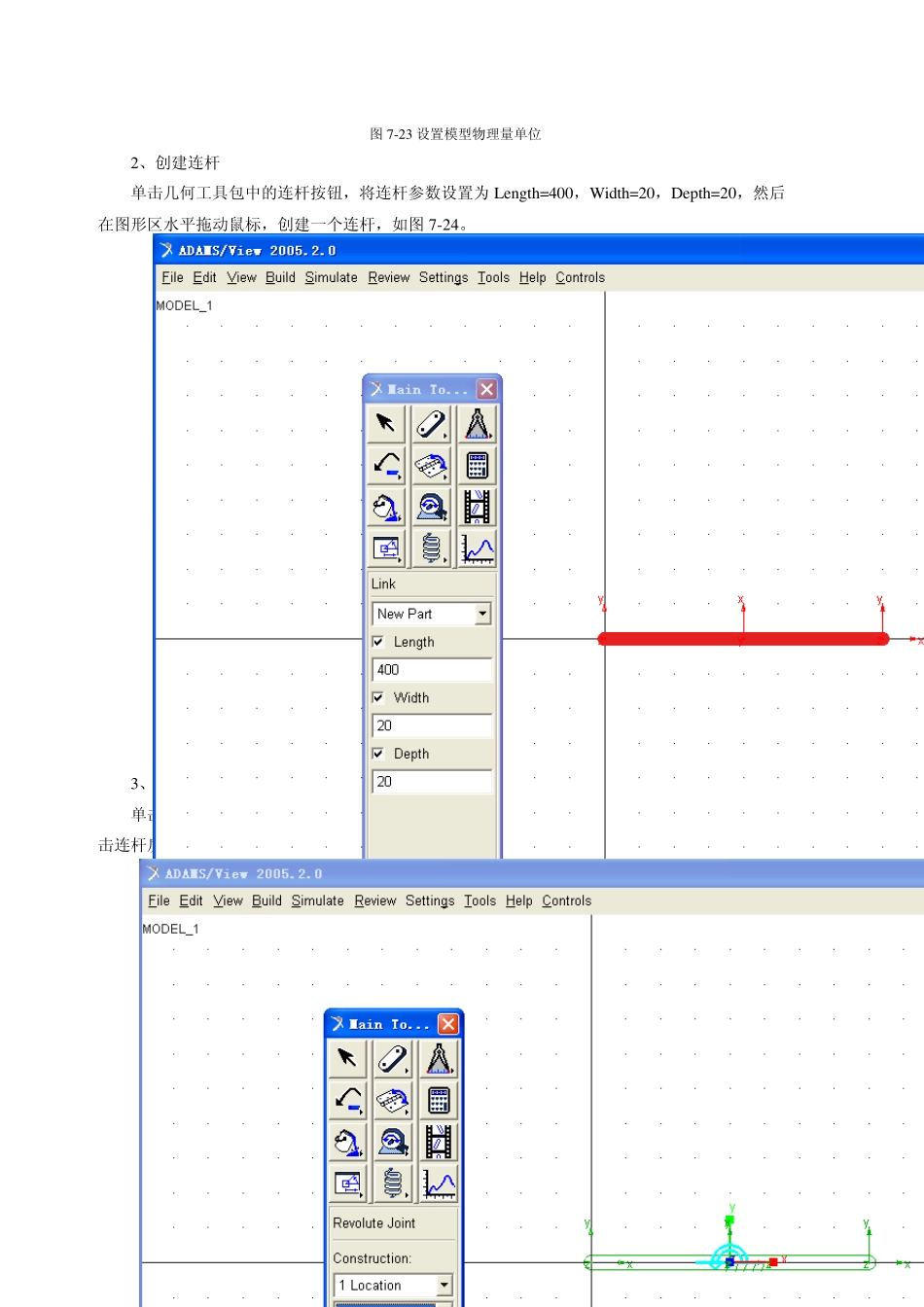
选择菜单栏【Settings】→【Units】命令,设置模型物理量单位,将单位设置成 MMKS,长度和力的单位设置成毫米和牛顿,如图7-23所示: 图7-23 设置模型物理量单位 2、创建连杆 单击几何工具包中的连杆按钮,将连杆参数设置为 Length=400,Width=20,Depth=20,然后在图形区水平拖动鼠标,创建一个连杆,如图7-24
图7-24 创建连杆 3、创建旋转副 单击运动副工具包中的旋转副按钮,将旋转副的参数设置为 1 Location 和 Normal to gird