这个内容是为以前投简历时写的,时间紧,没太认真写
懂点电子的应该能看懂,因为最近比较忙,也没时间写个好点的,能供普通爱好者理解的文章
等我以后有时间了一定写一个,造福模友
无人机的未来是广阔的
希望文章能对大家有帮助
车神(chasing high) 2011
22 APM 飞控系统介绍 APM 飞控系统是国外的一个开源飞控系统,能够支持固定翼,直升机,3 轴,4 轴,6 轴飞行器
在此我只介绍固定翼飞控系统
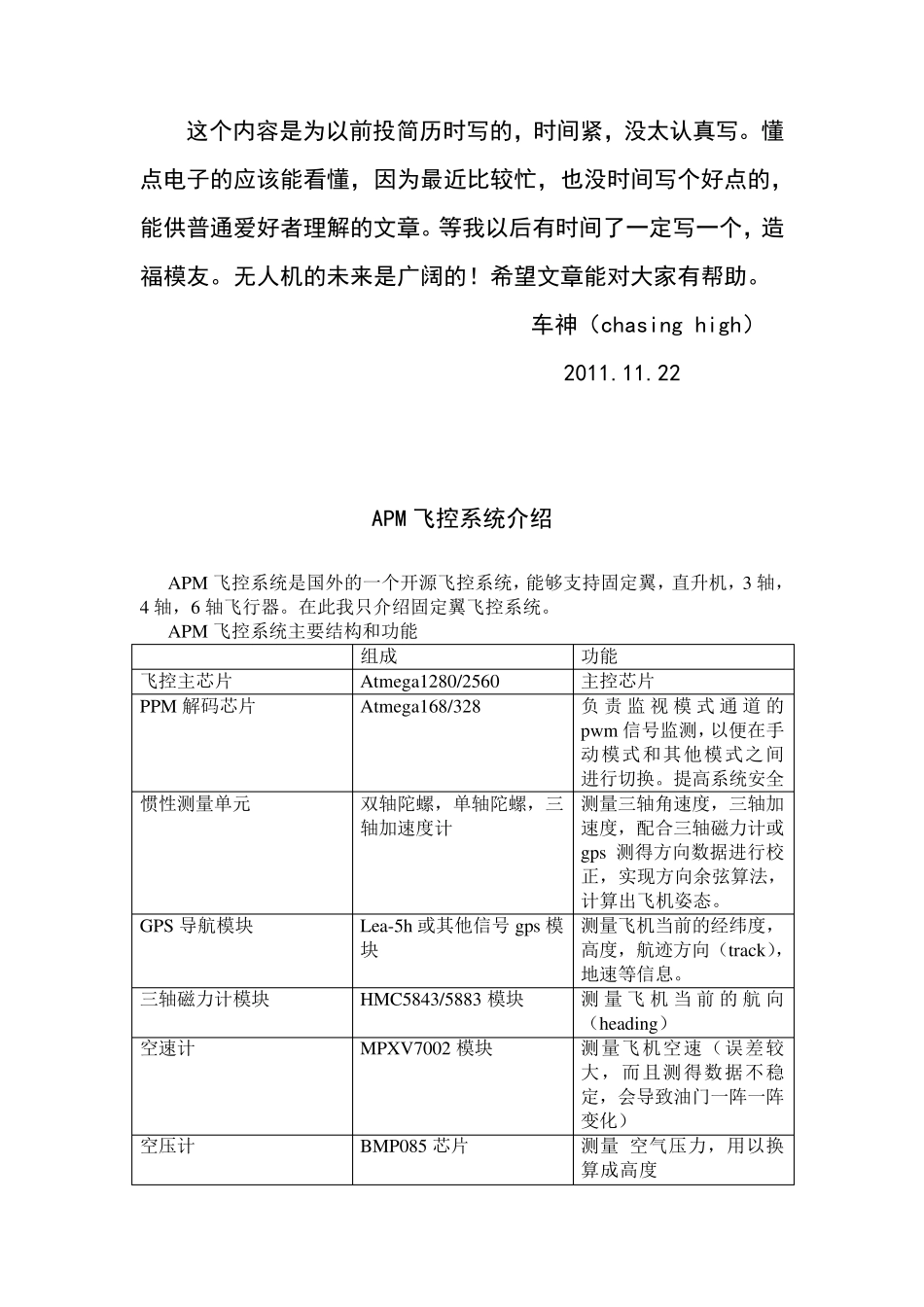
APM 飞控系统主要结构和功能 组成 功能 飞控主芯片 Atmega1280/2560 主控芯片 PPM 解码芯片 Atmega168/328 负 责 监 视 模 式 通 道 的pw m 信号监测,以便在手动模式和其他模式之间进行切换
提高系统安全 惯性测量单元 双轴陀螺,单轴陀螺,三轴加速度计 测量三轴角速度,三轴加速度,配合三轴磁力计或gps 测得方向数据进行校正,实现方向余弦算法,计算出飞机姿态
GPS 导航模块 Lea-5h 或其他信号 gps 模块 测量飞机当前的经纬度,高度,航迹方向(track),地速等信息
三轴磁力计模块 HMC5843/5883 模块 测 量 飞机当 前 的航 向(heading) 空速计 MPXV7002 模块 测量飞机空速(误差较大,而且测得数据不稳定,会导致油门一阵一阵变化) 空压计 BMP085 芯片 测量 空气压力,用以换算成高度 AD 芯片 ADS7844 芯片 将三轴陀螺仪、三轴加速度计、双轴陀螺仪输出温度、空速计输出的模拟电压转换成数字量,以供后续计算 其他模块 电源芯片,usb 电平转换芯片等 飞控原理 在 APM 飞控系统中,采用的是两级 PID 控制方式,第一级是导航级,第二级 是 控 制 级 , 导 航 级 的 计 算 集 中 在 medium_loop( ) 和 fastloop( ) 的upd