FB 41 /FB 42/FB 43P ID 参数设置中文说明 1、FB 41 SFB/FB "CONT_C" (连续控制器)在 SIMATIC S7 可编程逻辑控制器上使用,通过持续的输入和输出变量来控制工艺过程
在参数分配期间,可以通过激活或取消激活 PID 控制器的子功能使控制器适应过程的需要
使用参数分配工具可以轻松完成分配(菜单路径:开始 > Simatic > Step7 > 分配 PID 控制参数)
开始 > Simatic > Step7 > 分配 PID 控制(英文)中提供了在线电子手册
应用 可以使用该控制器作为 PID 固定设定值控制器或在多循环控制中作为层叠、混料或比率控制器
该控制器的功能基于使用模拟信号的采样控制器的PID 控制算法,必要时可以通过加入脉冲发生器阶段进行扩展,为使用成比例执行机构的两个或三个步骤控制器生成脉冲持续时间调制输出信号
注意只有在以固定时间间隔调用块时,在控制块中计算的值才是正确的
为此,应该在周期性中断OB (OB30 至 OB38)中调用控制块
在 CYCLE 参数中输入采样时间
说明 除了设定值和过程值分支中的功能,SFB/FB 还通过持续操作变量输出和手动影响操作值的选项实现了完整的 PID 控制器
下文提供了对这些子功能的详细说明: 设定值分支 以浮点格式在 SP_INT 输入键入设定值
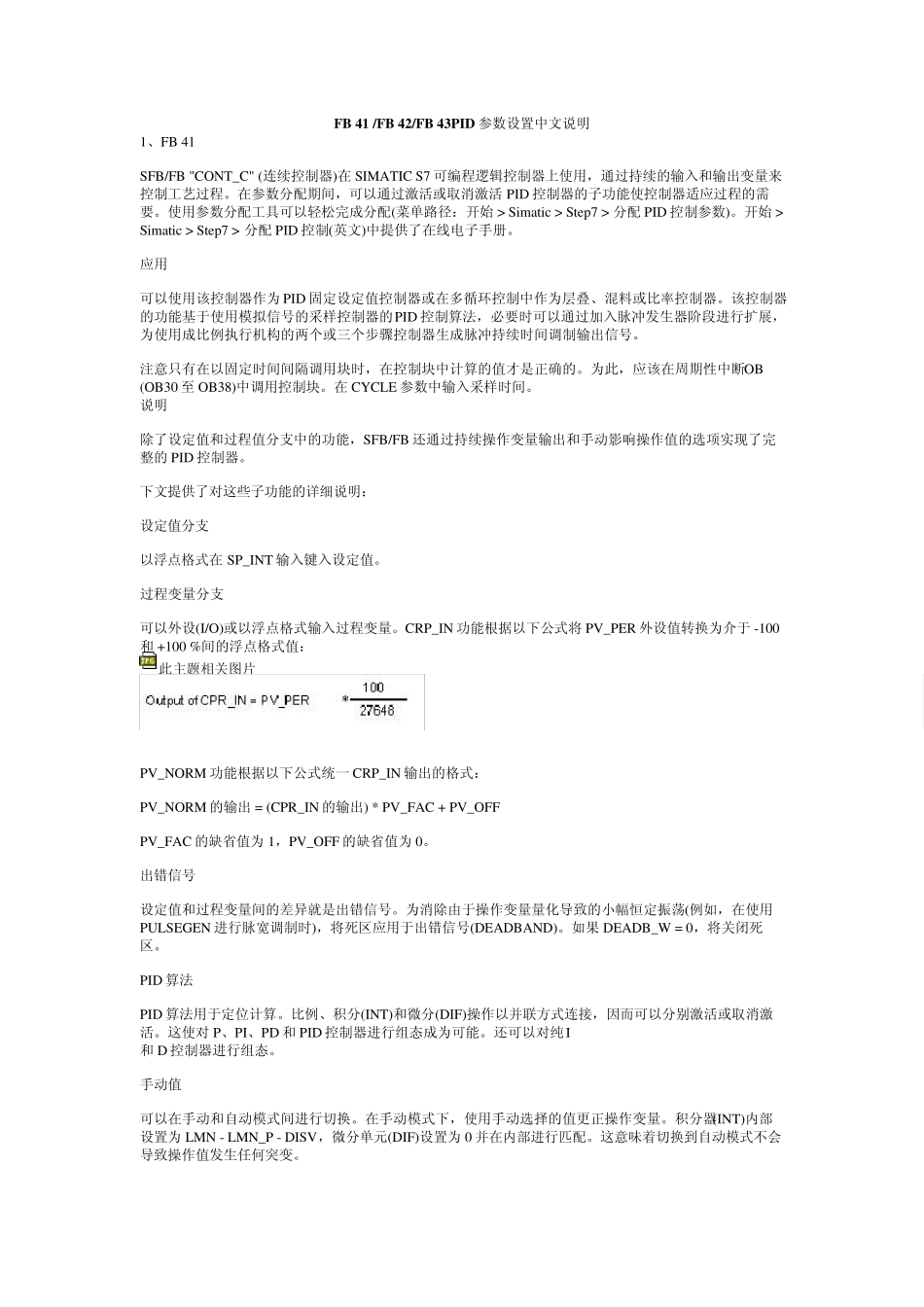
过程变量分支 可以外设(I/O)或以浮点格式输入过程变量
CRP_IN 功能根据以下公式将 PV_PER 外设值转换为介于 -100和 +100 %间的浮点格式值: 此主题相关图片 PV_NORM 功能根据以下公式统一 CRP_IN 输出的格式: PV_NORM 的输出 = (CPR_IN 的输出) * PV_FAC + PV_OFF PV_FAC 的缺省值为 1,PV_OFF 的缺省值为 0
出错信号 设定值和过