1Can 总线概述 CAN, 全称为“Controller Area Network”,是国际上应用最广泛的现场总线之一
20 世纪80 年代初,德国Bosch 公司为了解决现代汽车中众多的控制与测试仪表之间的数据交换问题,开发出 CAN 总线
CAN 总线能有效支持分布式控制或实时控制的串行通信网络,具有抗干扰性强和使用可靠等优点,最初主要应用汽车工业,现在广泛应用于汽车工业、航空工业和工业控制等自动化领域,如分布式环境监测系统、温室环境监控系统、变电站变监测系统等
CAN 总线是一种串行数据通信协议,其通信接口中集成了CAN 协议的物理层和数据链路层功能,可完成对数据的成帧处理,用户可在其基础上开发适应系统实际需要的应用层通信协议
CAN 协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块编码,采用这种方法可使网络内节点个数在理论上不受限制,还可使不同的节点同时收到相同的数据
CAN总线提供高速数据传送, 在短距离(40m)条件下具有高速(1Mbit/s)数据传输能力,而在最大距离 10000m 时具有低速(5kbits/s)传输能力,极适合在高速的工业自控应用上,CAN 总线可在同一网络上连接多种不同功能的传感器(如位置,温度或压力等)
CAN 总线的其他特点如下: (1)它是一种多主总线,即每个节点机均可成为主机,且节点机之间也可进行通信; (2)通信介质可以是双绞线、同轴电缆或光导纤维,通信速率可达 1Mbps; (3)数据段长度最多为8 个字节,可满足通常工业领域中控制命令,工作状态及测试数据的一般要求
同时,8 个字节不会占用总线时间过长,从而保证了通信的实时性; (4)CAN 协议采用CRC 检验并可提供相应的错误处理功能,保证了数据通信的可靠性
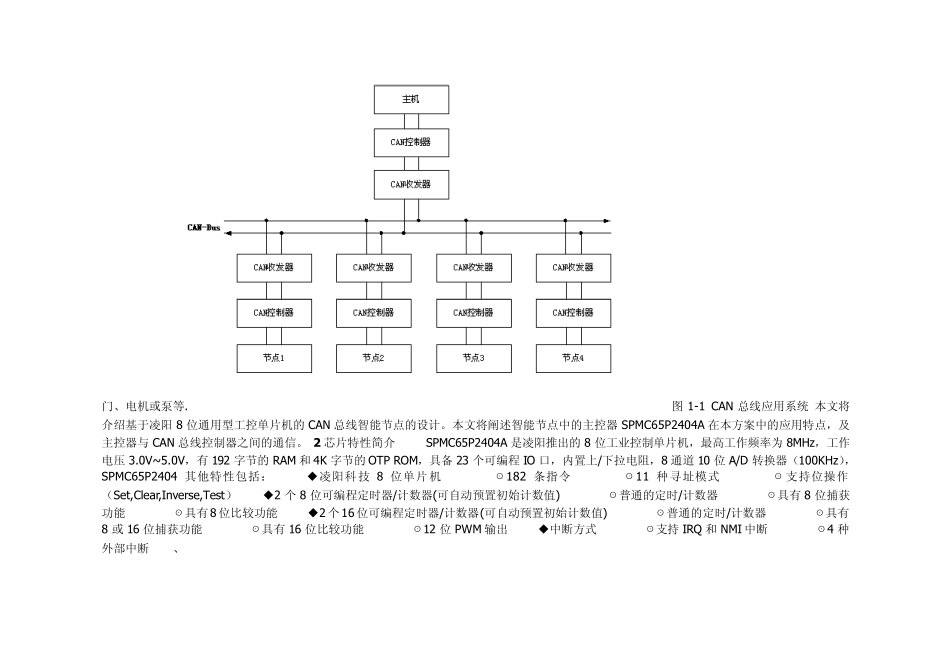
CAN 可以以多主方式工作,网络上任意节点均可以在任意时刻主动地向总线上其它节点发送信息,