第一章 软件设置 在进行仿真之前,建议完成培训阶段的DELMIA option 设置(参考文件1-Option
pdf); 第二章 仿真流程 2
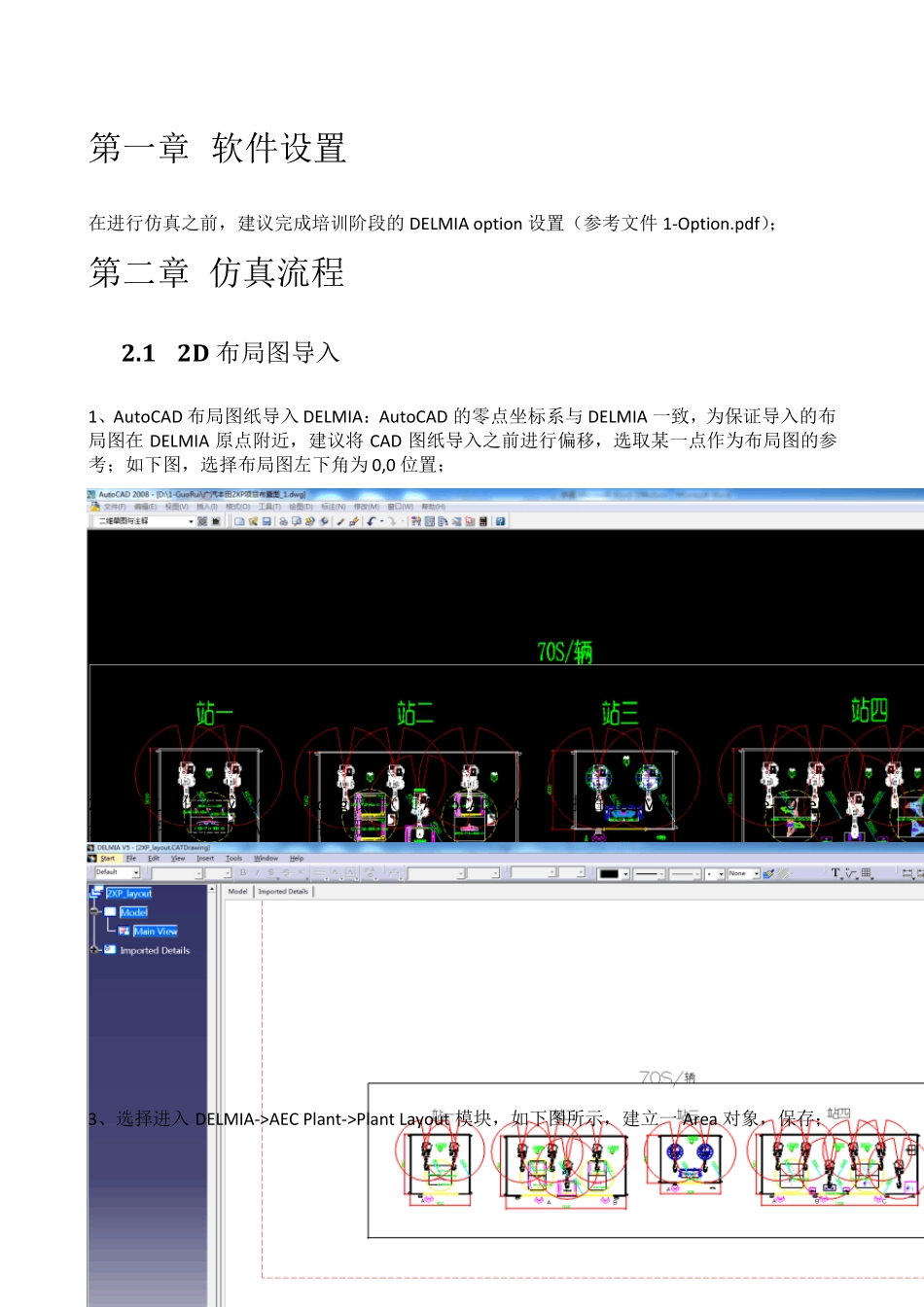
1 2D 布局图导入 1、AutoCAD 布局图纸导入DELMIA:AutoCAD 的零点坐标系与 DELMIA 一致,为保证导入的布局图在DELMIA 原点附近,建议将 CAD 图纸导入之前进行偏移,选取某一点作为布局图的参考;如下图,选择布局图左下角为 0,0 位置; 2、偏移之后保存成较低版本 dwg 文件(如 AutoCAD 2007),直接在DELMIA 中打开,File->Open,然后保存成*
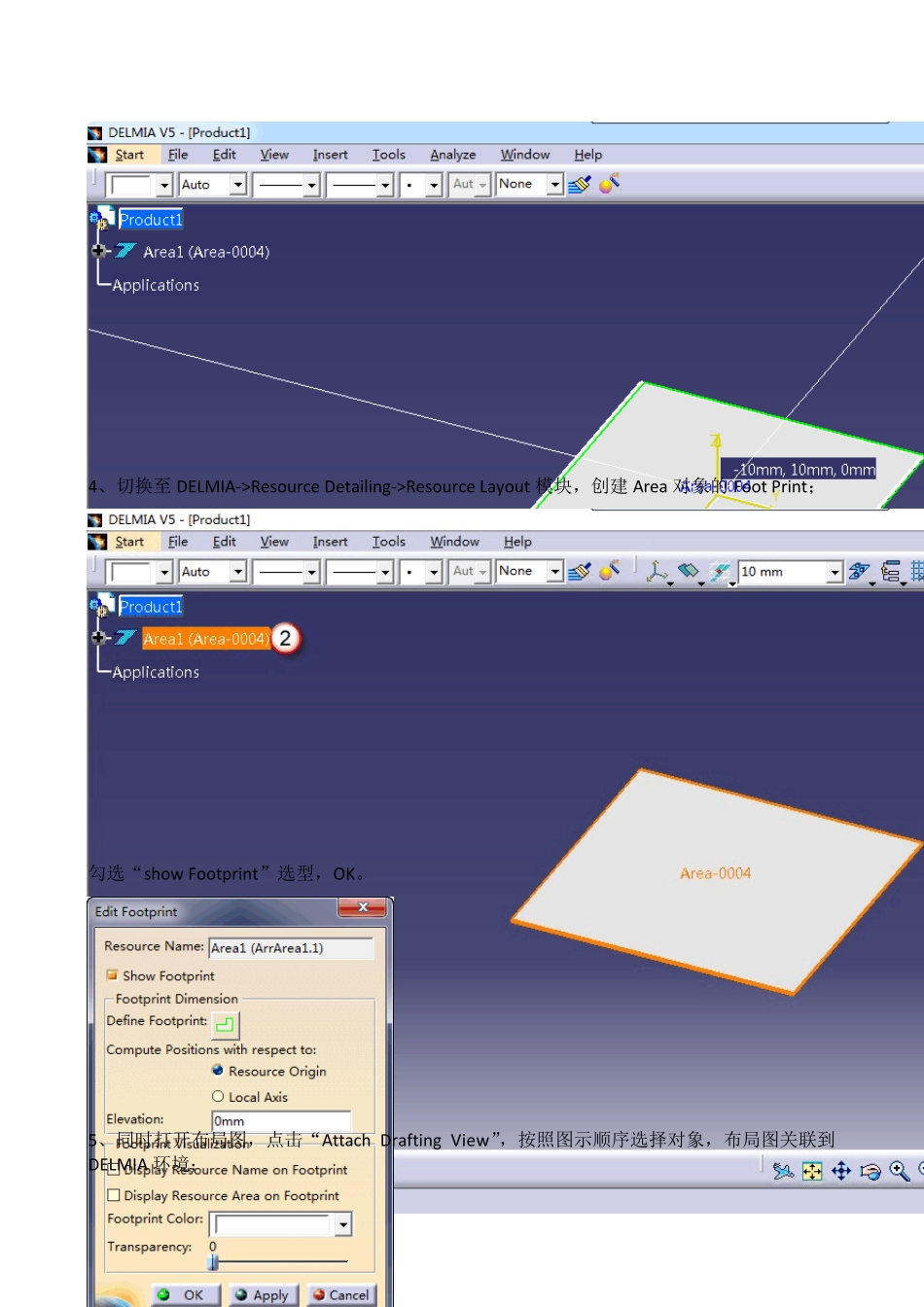
CATDrawing 文件备用 3、选择进入DELMIA->AEC Plant->Plant Layout 模块,如下图所示,建立一Area 对象,保存; 4、切换至DELMIA->Resource Detailing->Resource Layout 模块,创建Area 对象的Foot Print; 勾选“show Footprint”选型,OK
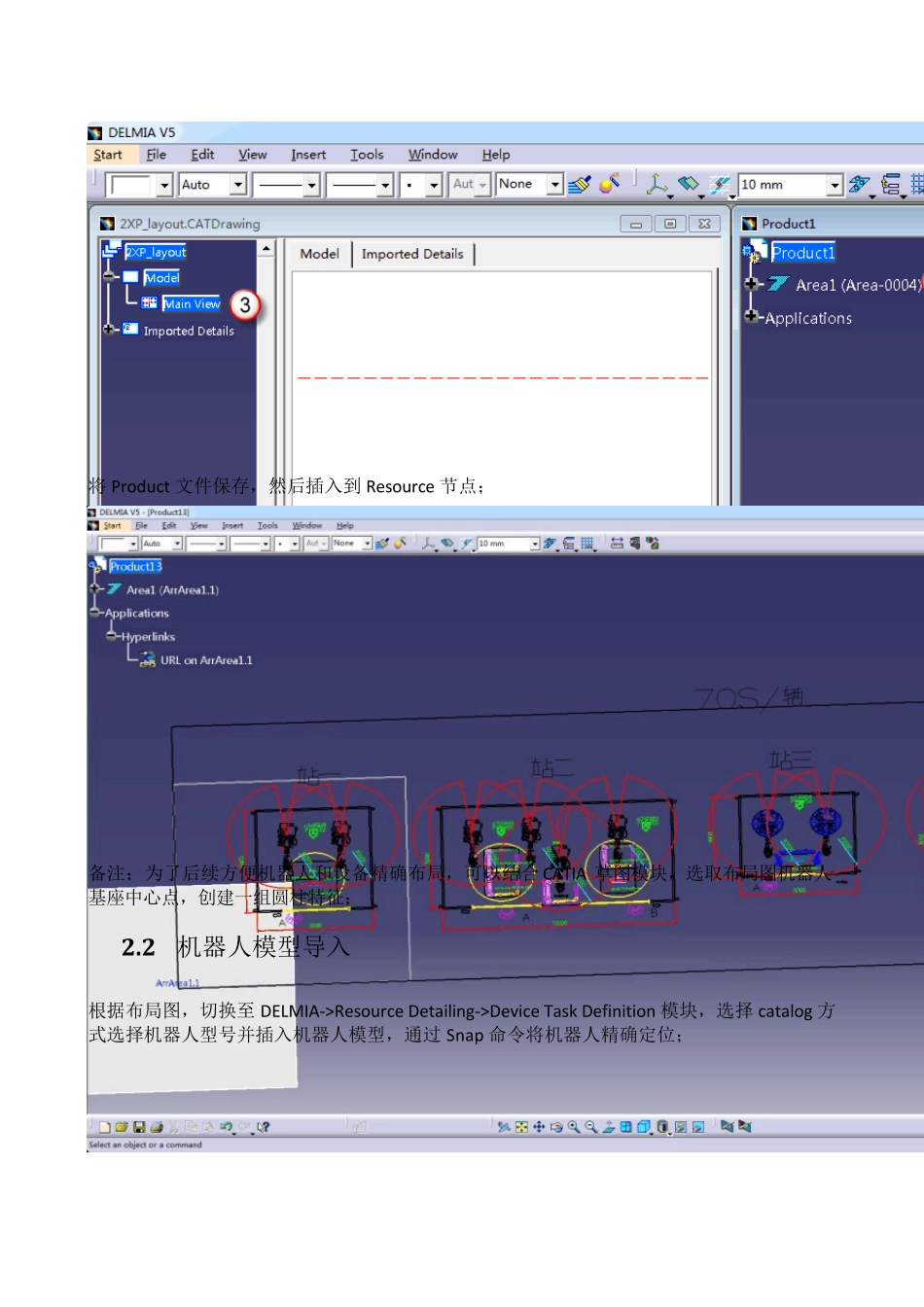
5、同时打开布局图,点击“Attach Drafting View”,按照图示顺序选择对象,布局图关联到DELMIA 环境; 将Product 文件保存,然后插入到Resource 节点; 备注:为了后续方便机器人和设备精确布局,可以结合CATIA 草图模块,选取布局图机器人基座中心点,创建一组圆柱特征; 2
2 机器人模型导入 根据布局图,切换至 DELMIA->Resource Detailing->Device Task Definition 模块,选择 catalog 方式选择机器人型号并插入机器人模型,通过 Snap 命令将机器人精确定位; 2
3 三维数据导入 1、 选择从供应商提供的以工位为单位的焊枪及夹具设计数据,如下图为 3dxml 轻量化格式文件,直接打开并