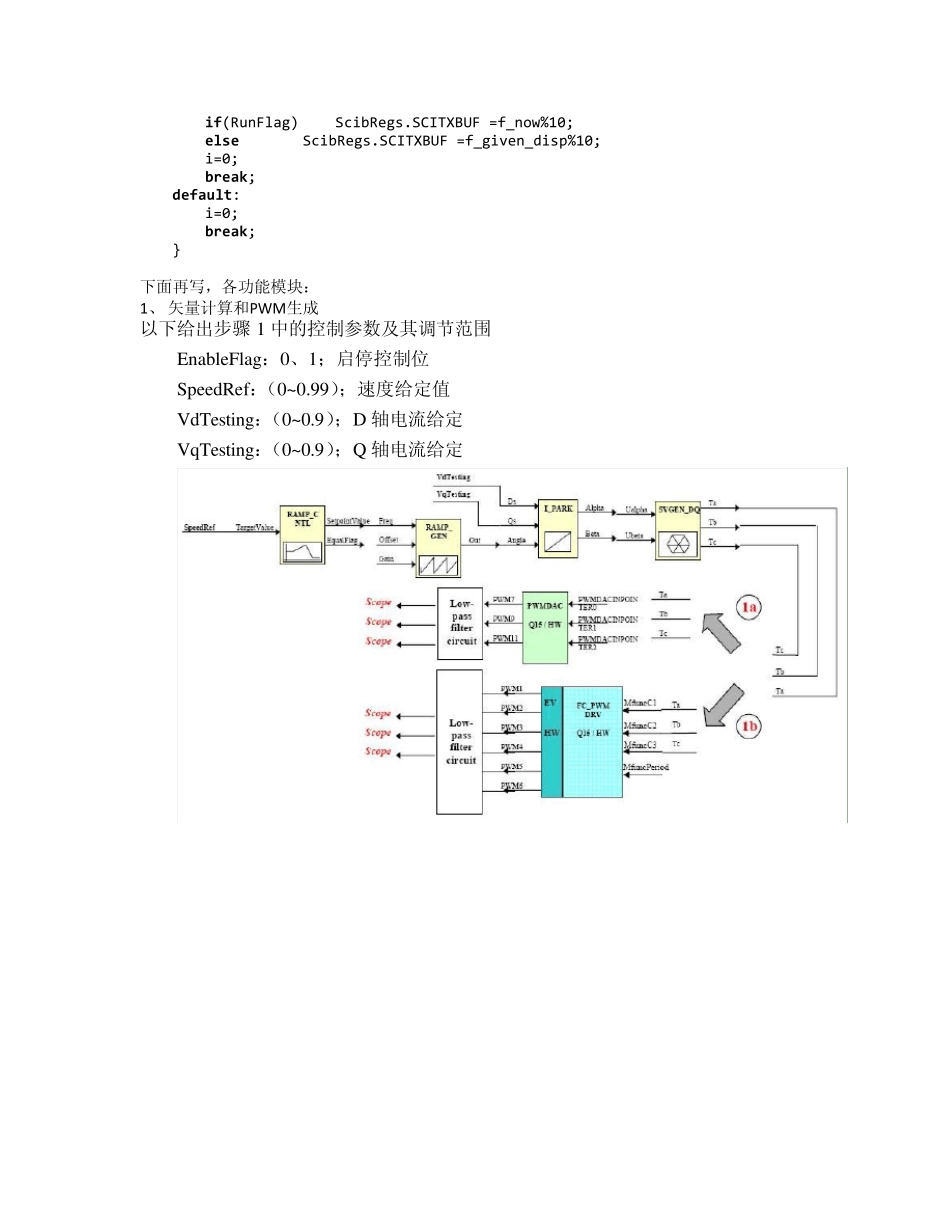
使用TMS320C2812 控制异步电机的程序,采用SVPW M 空间矢量控制算法,运行正常,加减速,正反转等
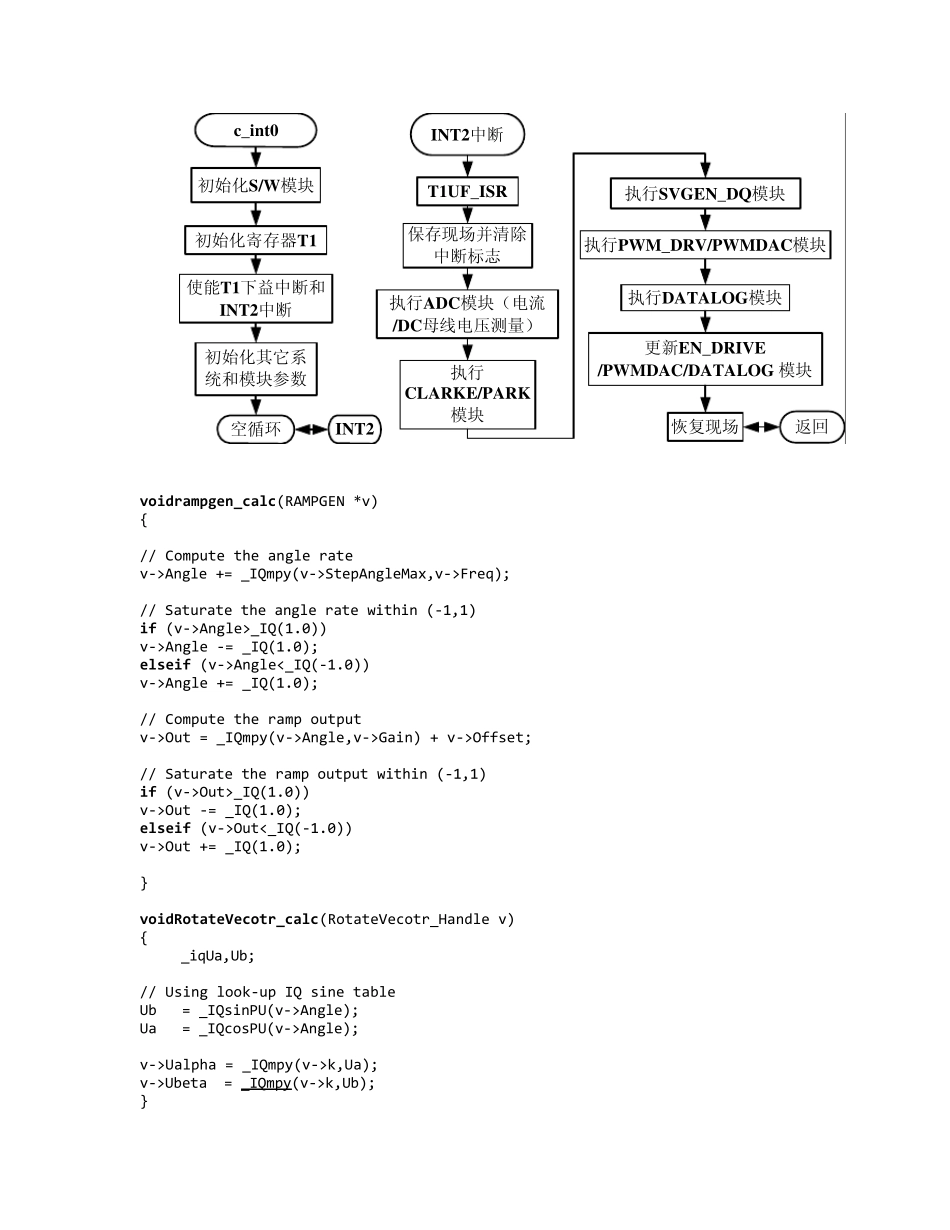
首先,初始化设备, /*初始化系统*/ InitSysCtrl(); /*关中断*/ DINT; IER = 0x0000; IFR = 0x0000; /*初始化PIE控制寄存器*/ InitPieCtrl(); /*初始化PIE矢量表*/ InitPieVectTable(); /*初始化SCIb寄存器*/ InitSci(); /*设置CPU定时器*/ InitCpuTimers(); ConfigCpuTimer(&CpuTimer2, 150, 20000); StartCpuTimer2(); /*初始化IO口*/ InitGpio(); /*初始化EV*/ eva
Init(&eva); evb
Init(&evb); 下步,(个人习惯写个显示程序) voidShowDisp(void) //显示 { staticunsignedinti=0; switch(i) { case 0: i++; ScibRegs
SCITXBUF=(ku&0xf)+(3Gain) + v->Offset; // Saturate the ramp output within (-1,1) if (v->Out>_IQ(1
0)) v->Out -= _IQ(1
0); elseif (v->OutOut += _IQ(1
0); } voidRotateVecotr_calc(RotateVecotr_Handle v) { _iqUa,Ub; // Using look-up IQ sine table Ub = _IQsinPU(v->Angle); Ua = _IQcosPU(v->Angle); v->Ualpha = _IQmpy(v->k,Ua); v-