下载后可任意编辑中国海洋大学工程学院机械电子工程讨论生课程考核论文题目: AUV 水下机器人运动控制系统讨论报告 课程名称: 运动控制技术 姓 名: 李思乐 学 号: 21100933077 院 系: 工程学院机电工程系 专 业: 机械电子工程 时 间: 2024-12-26 课程成绩: 任课老师: 谭俊哲 下载后可任意编辑AUV 水下机器人运动控制系统设计 摘要:以主推加舵控制的小型自治水下机器人为讨论对象,建立了水下机器人的数学模型并进行了分析
根据机器人结构的特点,对模型进行了必要的简化
设计了机器人的运动控制系统
以成功研制的无缆自治水下机器人(AUV) 为基础, 对其航行控制和定位控制方法进行了较详细的分析
同时介绍了它的推动器布置、控制系统结构、推力分配等方法
最后展示了它的运行实验结果
关键词:水下机器人;总体设计方案;运动控制系统;电机仿真1 引言近年来国外水下机器人技术进展迅速,技术水平较高
其中,具有代表性的产品有:美国 Video Ray 公司开发出的 Scout、Explorer、Pro 等系列遥控式水下机器人,美国 Seabotix 公司研发的 LBV-ROV 系列,英国 AC-CESS 公司的 AC-ROV 系列
随着海洋开发、探测的需求越来越强,水下机器人成为全世界讨论的热门课题
小型自治水下机器人具有低成本、小型化、操作灵活等特点成为近年来国内外讨论的热点
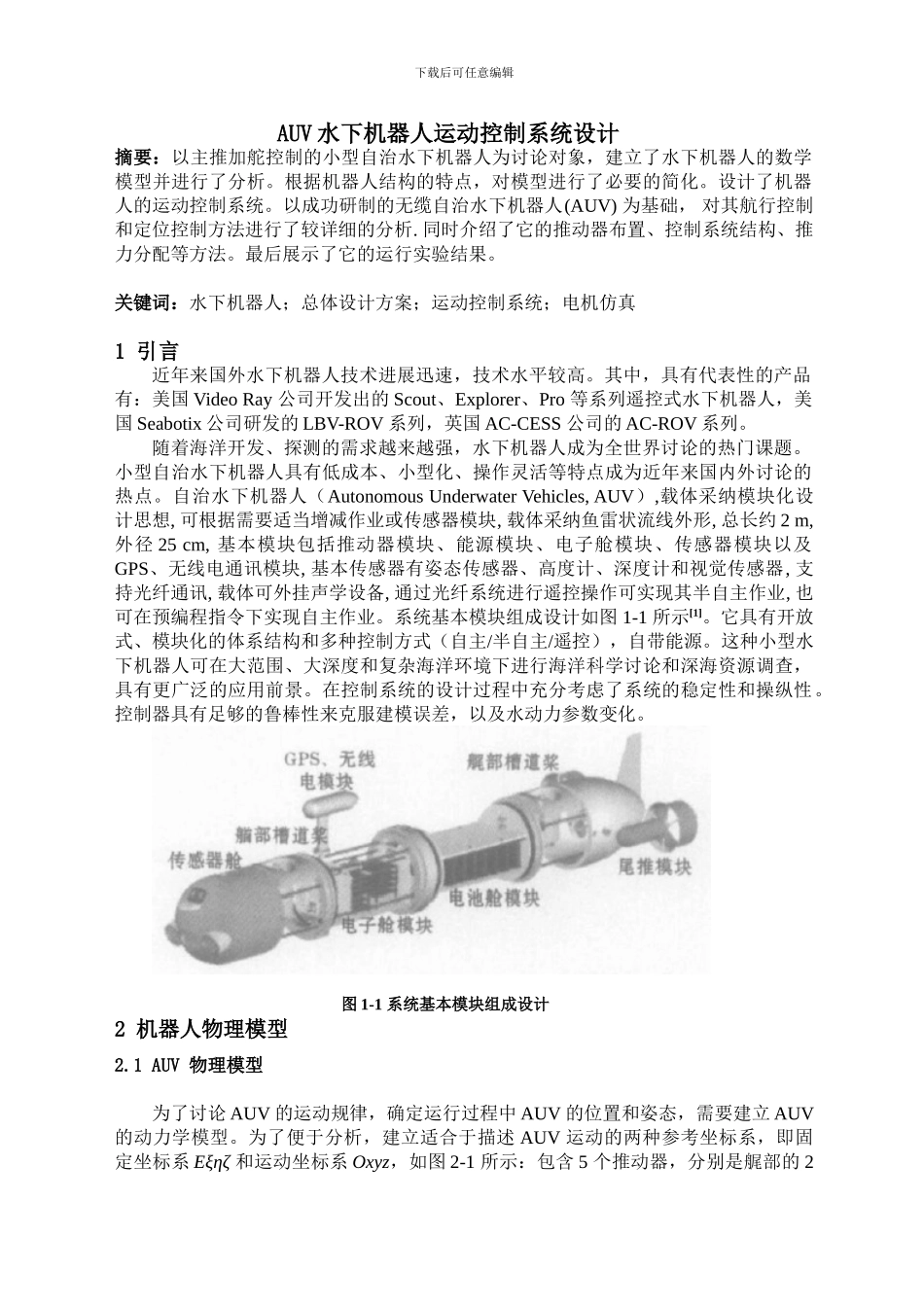
自治水下机器人(Autonomous Underwater Vehicles, AUV),载体采纳模块化设计思想, 可根据需要适当增减作业或传感器模块, 载体采纳鱼雷状流线外形, 总长约 2 m, 外径 25 cm, 基本模块包括推动器模块、能源模块、电子舱模块、传感器模块以及GPS、无线电通讯模块, 基本传感器有姿态传感器、高度计、深度计和视觉传感器, 支持光纤通讯, 载体可外挂声学设