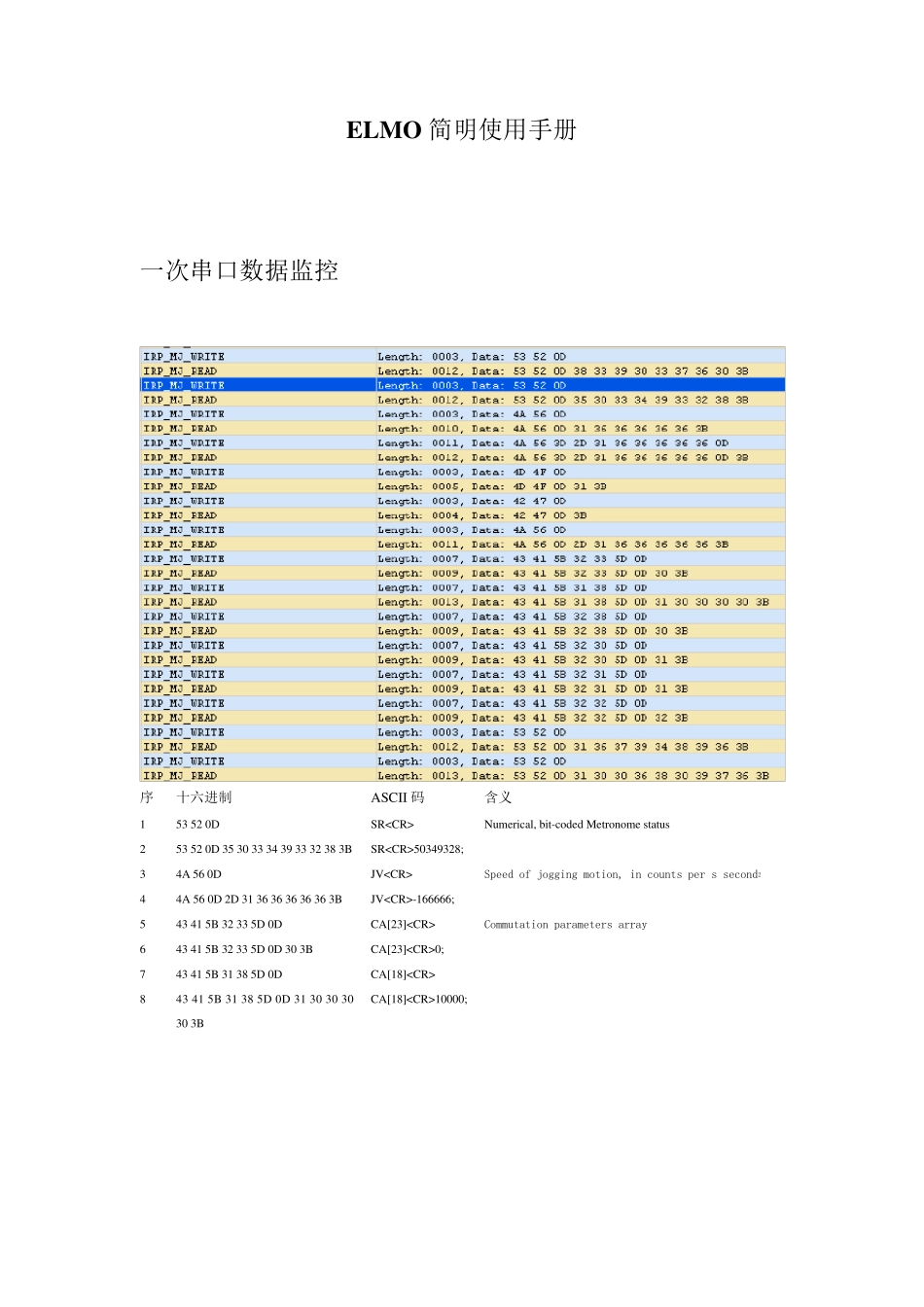
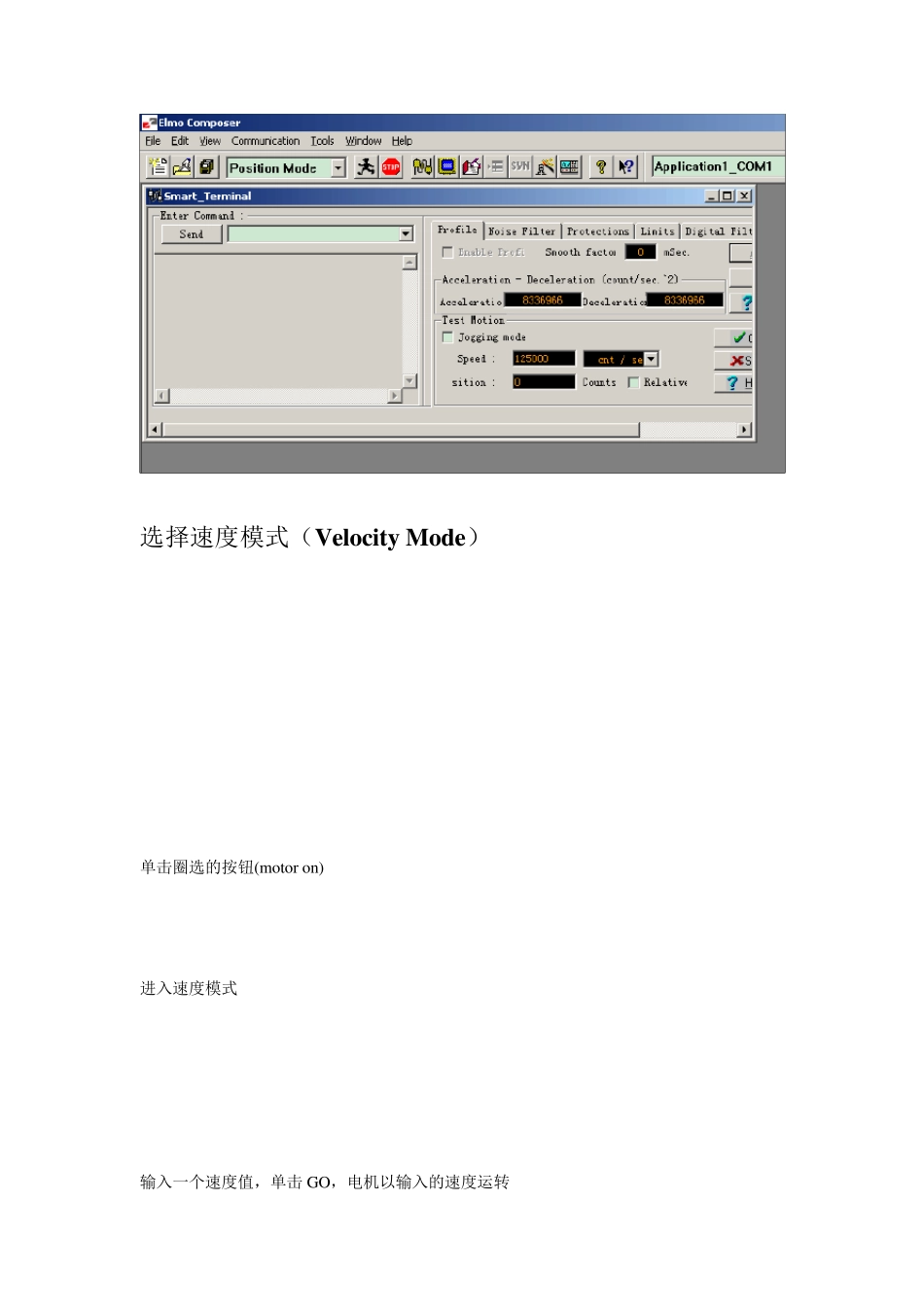
ELMO简明使用手册 一次串口数据监控 序 十六进制 ASCII 码 含义 1 53 52 0D SR Nu merical, bit-coded Metronome statu s 2 53 52 0D 35 30 33 34 39 33 32 38 3B SR50349328; 3 4A 56 0D JV Speed of jogging motion, in counts per s second2 4 4A 56 0D 2D 31 36 36 36 36 36 3B JV-166666; 5 43 41 5B 32 33 5D 0D CA[23] Commutation parameters array 6 43 41 5B 32 33 5D 0D 30 3B CA[23]0; 7 43 41 5B 31 38 5D 0D CA[18] 8 43 41 5B 31 38 5D 0D 31 30 30 30 30 3B CA[18]10000; 上电 ELMO演示箱 连接演示箱的 ELMO演示箱的 COM1 到电脑的串口(COM1) 打开 ELMO软件(软件可以到官方网站下载) 单击完成 选择速度模式(Velocity Mode) 单击圈选的按钮(motor on) 进入速度模式 输入一个速度值,单击GO,电机以输入的速度运转 单击Stop 停止,单击Direction 改变方向
输入 20000(cnt/sec)按回车后,相当于输入 JV=20000; BG 我们可以在命令输入框内输入命令实现控制
输入: JV=30000;回车 BG 回车 电机以 30000cnt/sec 运转 输入: ST 回车 电机将停止 提示:ST(相当于 STOP)BG(相当于 BEGIN) 设定数字输入端口的功能 我们可以设定 INPUT 1 为高电平,硬停止 通过命令输入 JV=3