电子工程学院 141第 七章 GPS 信号的捕获与跟踪 第 七章 GPS 信号的捕获与跟踪 前几章讲述了GPS 系统结构和GPS 定位原理,本章介绍GPS 软件接收机和GPS 信号处理方法,主要探讨对GPS 信号进行捕获和跟踪的过程
捕获的目的是搜索到可视卫星,并粗略地确定卫星信号的载波频率和伪码相位,跟踪的目的则是精确地跟踪信号的载波频率和伪码相位的变化,完成GPS 信号解扩和解调,从而提取出导航电文、伪距观测量等
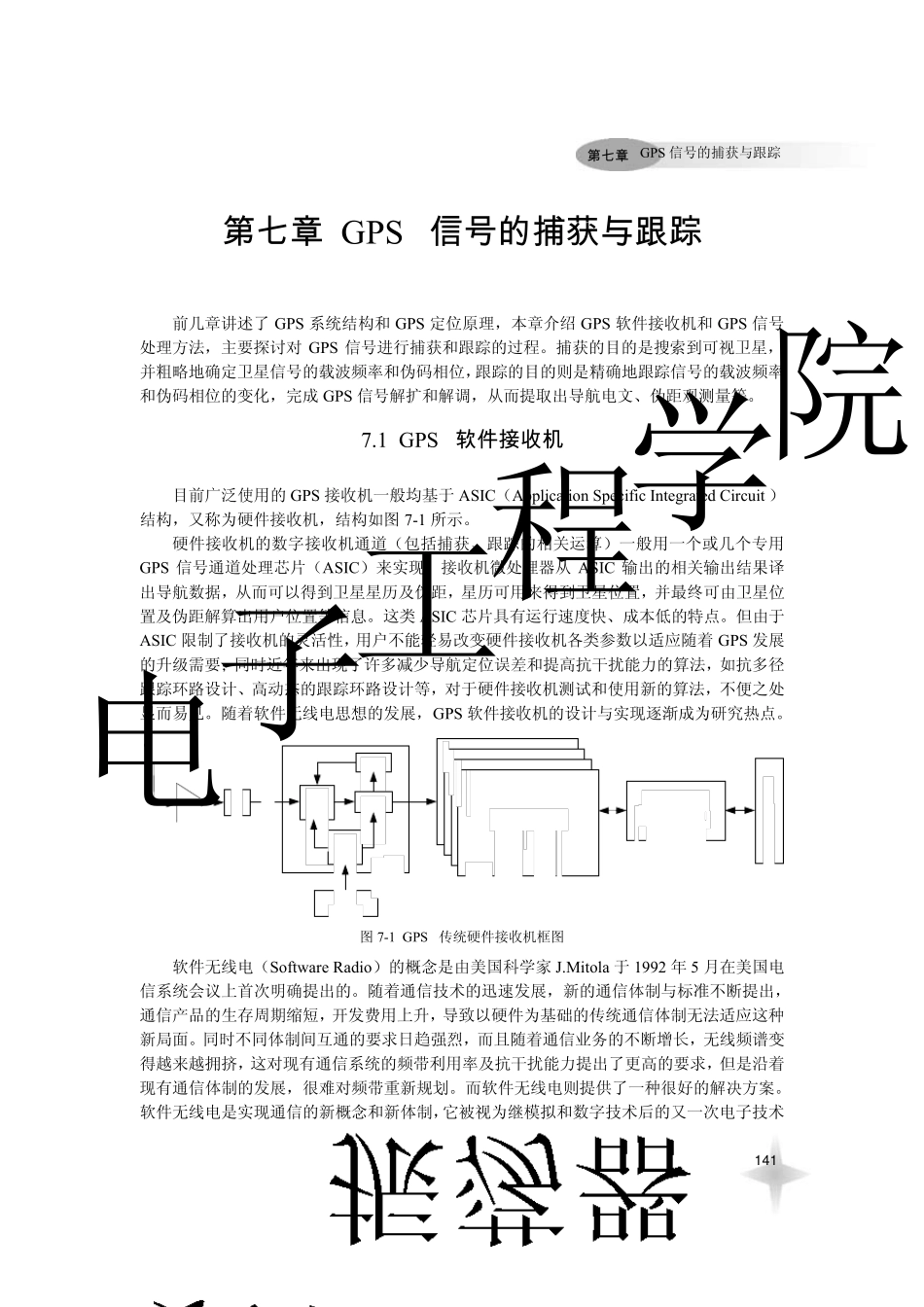
1 GPS 软件接收机 目前广泛使用的GPS 接收机一般均基于 ASIC(Application Specific Integrated Circuit )结构,又称为硬件接收机,结构如图 7-1 所示
硬件接收机的数字接收机通道(包括捕获、跟踪的相关运算)一般用一个或几个专用GPS 信号通道处理芯片(ASIC)来实现,接收机微处理器从ASIC 输出的相关输出结果译出导航数据,从而可以得到卫星星历及伪距,星历可用来得到卫星位置,并最终可由卫星位置及伪距解算出用户位置等信息
这类 ASIC 芯片具有运行速度快、成本低的特点
但由于ASIC 限制了接收机的灵活性,用户不能轻易改变硬件接收机各类参数以适应随着 GPS 发展的升级需要;同时近年来出现了许多减少导航定位误差和提高抗干扰能力的算法,如抗多径跟踪环路设计、高动态的跟踪环路设计等,对于硬件接收机测试和使用新的算法,不便之处显而易见
随着软件无线电思想的发展,GPS 软件接收机的设计与实现逐渐成为研究热点
图 7-1 GPS 传统硬件接收机框图 软件无线电(Softw are Radio)的概念是由美国科学家 J
Mitola 于 1992 年 5 月在美国电信系统会议上首次明确提出的
随着通信技术的迅速发展,新的通信体制与标准不断提出,通信产品的生存周期缩短,开发费用上升,导致以硬件为基础的传统通信