1 .1 解: (1 )机器人踢足球:开环系统 输入量:足球位置 输出量:机器人的位置 (2 )人的体温控制系统:闭环系统 输入量:正常的体温 输出量:经调节后的体温 (3 )微波炉做饭:开环系统:输入量:设定的加热时间 输出量:实际加热的时间 (4 )空调制冷:闭环系统 输入量:设定的温度 输出量:实际的温度 1 .2 解: 开环系统: 优点:结构简单,成本低廉;增益较大;对输入信号的变化响应灵敏;只要被控对象稳定,系统就能稳定工作
缺点:控制精度低,抗扰动能力弱 闭环控制 优点:控制精度高,有效抑制了被反馈包围的前向通道的扰动对系统输出量的影响;利用负反馈减小系统误差,减小被控对象参数对输出量的影响
缺点:结构复杂,降低了开环系统的增益,且需考虑稳定性问题
3 解:自动控制系统分两种类型:开环控制系统和闭环控制系统
开环控制系统的特点是:控制器与被控对象之间只有顺向作用而无反向联系,系统的被控变量对控制作用没有任何影响
系统的控制精度完全取决于所用元器件的精度和特性调整的准确度
只要被控对象稳定,系统就能稳定地工作
闭环控制系统的特点: (1 ) 闭环控制系统是利用负反馈的作用来减小系统误差的 (2 ) 闭环控制系统能够有效地抑制被反馈通道保卫的前向通道中各种扰动对系统输出量的影响
(3 ) 闭环控制系统可 以 减小被控对象的参数变化对输出量的影响
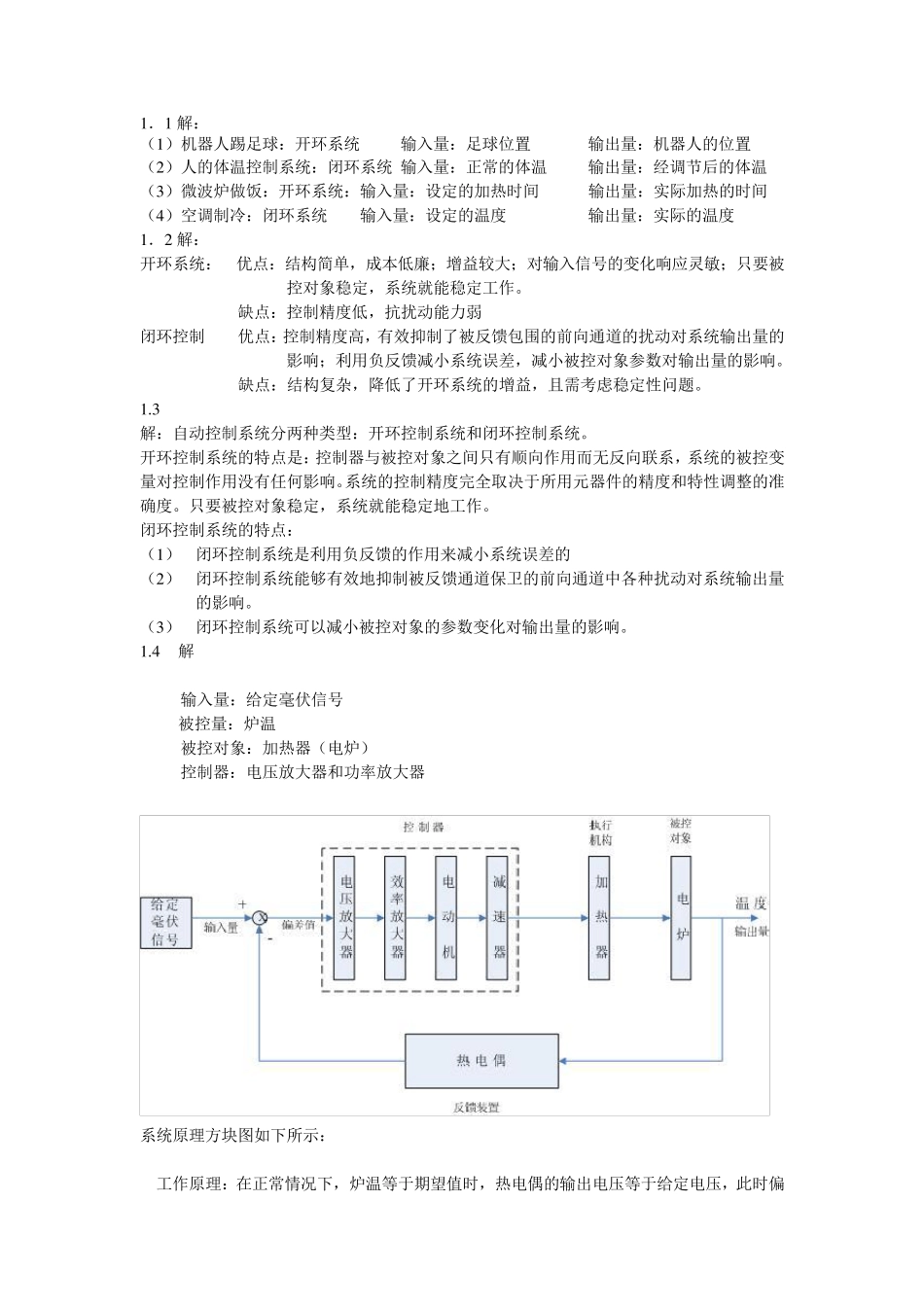
4 解 输入量:给 定毫 伏 信号 被控量:炉温 被控对象:加热器(电 炉) 控制器:电 压 放 大器和功 率 放 大器 系统原 理 方 块 图 如 下 所示 : 工作原 理 :在 正常情 况 下 ,炉温等 于期 望 值 时,热电 偶 的输出电 压 等 于给 定电 压 ,此 时偏 差信号为零,电动机不动,调压器的滑动触点停留在某个合适的位置上
此时,炉子散失的热量正好等于从加热器获取的热量,形成稳定