三维铰接连接单元COMBIN7 7
1 COMBIN7 单元说明 COMBIN7是三维销钉(或旋转)铰链单元,可用于在公共点上连接模型的两个或多个部分
单元的功能包括连接柔度(或刚度),摩擦、阻尼和一定的控制功能,其中最重要的一条就是大变形功能,这时局部坐标系固定于连接单元并随之移动
本单元适用于运动学静力分析和运动学动力分析
一个具有单向控制但功能较少的单元是COMBIN37
与本单元类似,但没有远程控制功能的单元是COMBIN14, MASS21, COMBIN39, and COMBIN40
1三维铰接连接单元COMBIN7 7
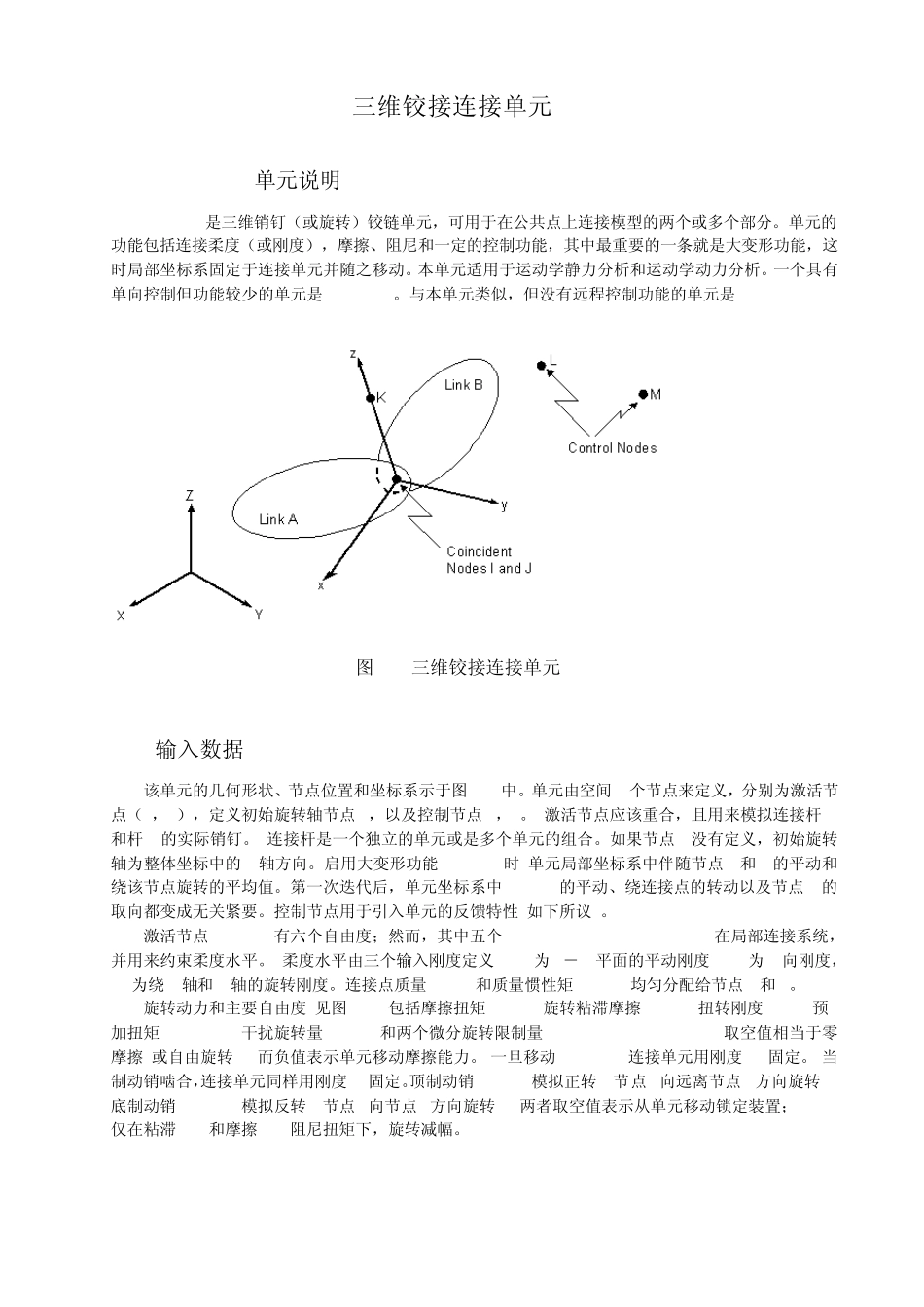
2 输入数据 该单元的几何形状、节点位置和坐标系示于图 7
单元由空间 5个节点来定义,分别为激活节点(I,J),定义初始旋转轴节点K,以及控制节点L,M
激活节点应该重合,且用来模拟连接杆 A和杆 B的实际销钉
连接杆是一个独立的单元或是多个单元的组合
如果节点K没有定义,初始旋转轴为整体坐标中的Z轴方向
启用大变形功能[NLGEOM]时,单元局部坐标系中伴随节点I和 J的平动和绕该节点旋转的平均值
第一次迭代后,单元坐标系中 X-Y-Z 的平动、绕连接点的转动以及节点K的取向都变成无关紧要
控制节点用于引入单元的反馈特性(如下所议)
激活节点 (I, J) 有六个自由度;然而,其中五个 (UX, UY, UZ, ROTX, ROTY) 在局部连接系统,并用来约束柔度水平
柔度水平由三个输入刚度定义: K1 为 X-Y 平面的平动刚度, K2 为 Z向刚度, K3为绕 X轴和 Y轴的旋转刚度
连接点质量(MASS)和质量惯性矩(IMASS)均匀分配给节点I和 J
旋转动力和主要自由度(见图 7
2)包括摩擦扭矩 (TF), 旋转粘滞摩擦 (CT), 扭转刚度(K4), 预加扭矩 (TLOAD), 干扰旋转量(ROT