1 第六章 伺服控制系统 第一节 概 述 伺服控制系统是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度及动力输出的自动控制系统
如防空雷达控制就是一个典型的伺服控制过程,它是以空中的目标为输入指令要求,雷达天线要一直跟踪目标,为地面炮台提供目标方位;加工中心的机械制造过程也是伺服控制过程,位移传感器不断地将刀具进给的位移传送给计算机,通过与加工位置目标比较,计算机输出继续加工或停止加工的控制信号
绝大部分机电一体化系统都具有伺服功能,机电一体化系统中的伺服控制是为执行机构按设计要求实现运动而提供控制和动力的重要环节
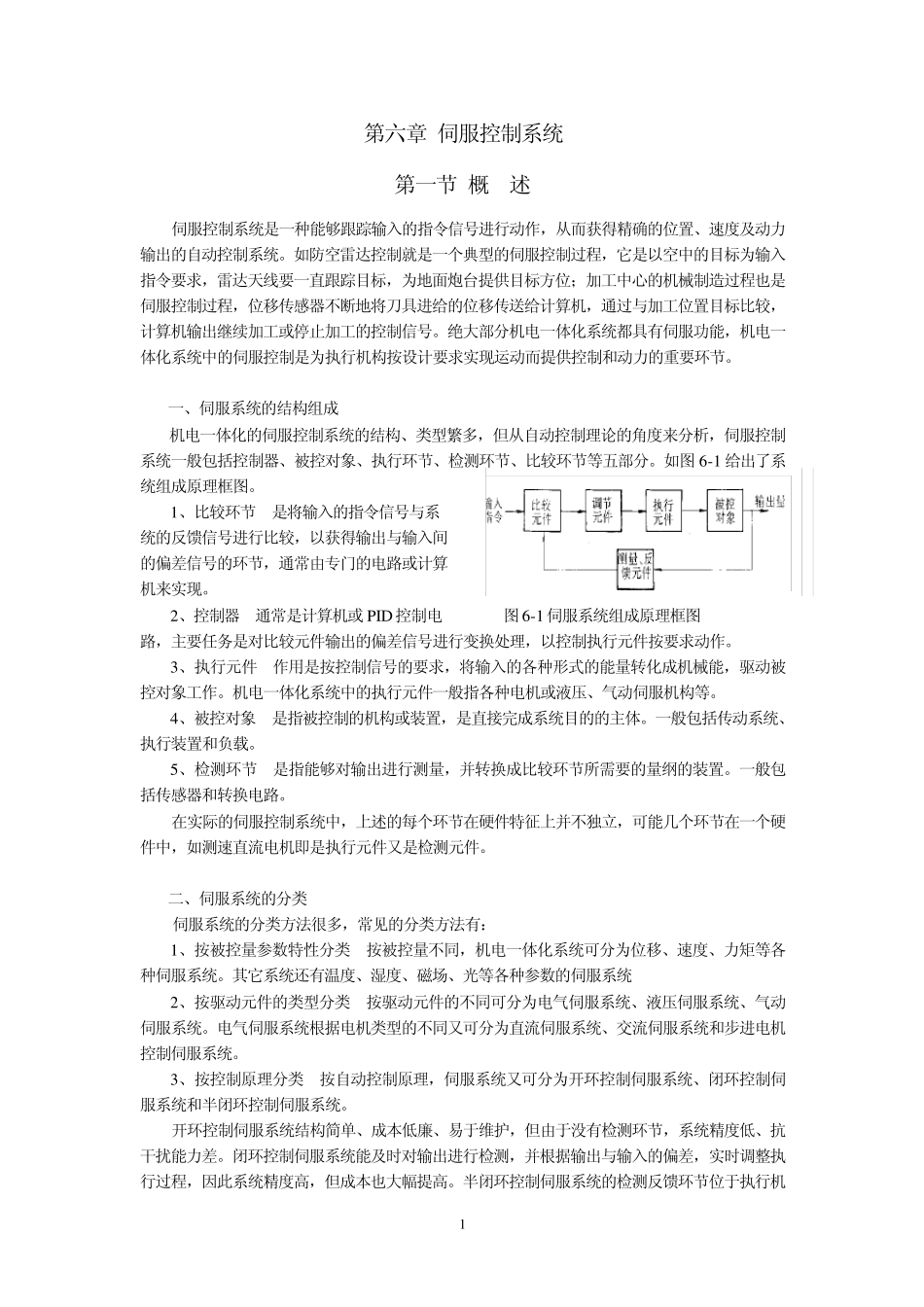
一、伺服系统的结构组成 机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分
如图 6-1 给出了系统组成原理框图
1、比较环节 是将输入的指令信号与系 统的反馈信号进行比较,以获得输出与输入间 的偏差信号的环节,通常由专门的电路或计算 机来实现
2、控制器 通常是计算机或 P ID控制电 图6-1伺服系统组成原理框图 路,主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作
3、执行元件 作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作
机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等
4、被控对象 是指被控制的机构或装置,是直接完成系统目的的主体
一般包括传动系统、执行装置和负载
5、检测环节 是指能够对输出进行测量,并转换成比较环节所需要的量纲的装置
一般包括传感器和转换电路
在实际的伺服控制系统中,上述的每个环节在硬件特征上并不独立,可能几个环节在一个硬件中,如测速直流电机即是执行元件又是检测元件
二、伺服系统的分类 伺服系统的分类方法很多,常见的分类方法有: 1、按被控