下载后可任意编辑惯性导航系统误差传播特性分析报告一、系统误差方程的建立及分析1、误差源 1)元件误差 主要有陀螺的漂移、标度因数误差、加速度计的零偏和标度因数误差、计算机的舍入误差、电流变换装置的误差等
2)安装误差 主要指加速度计和陀螺仪在平台上的安装误差
3)初始条件误差 包括平台的初始误差以及以及计算机在解算方程时的初始给定误差
4)运动干扰 主要是冲击和振动造成的干扰
5)其它误差 如地球曲率半径的描述误差、有害加速度补偿忽略二阶小量造成的误差等等
2、误差分析的方法1)误差分析的目的是定量地估算惯导系统测算结束时的准确程度
正确的地理位置由当地地理坐标系来量取,而实际的测算结果是由系统计算得出的
为了讨论两者的偏差,这里引入了一个计算机坐标系(用 c 来标识),即将 c 系和 t 系作比较,从而定义出各种误差量
2)一般情况下,所有误差源均可看成是对理想特性的小扰动,因而各个误差量都是对系统的一阶小偏差输入量
因此,在讨论各误差量之间的关系时,完全可以取一阶近似而忽略二阶以上的小量
3)误差分析要求首先建立误差方程,即反映各误差量之间有机联系的方程
这种方程是依据系统的机械编排方程通过微分处理来求取
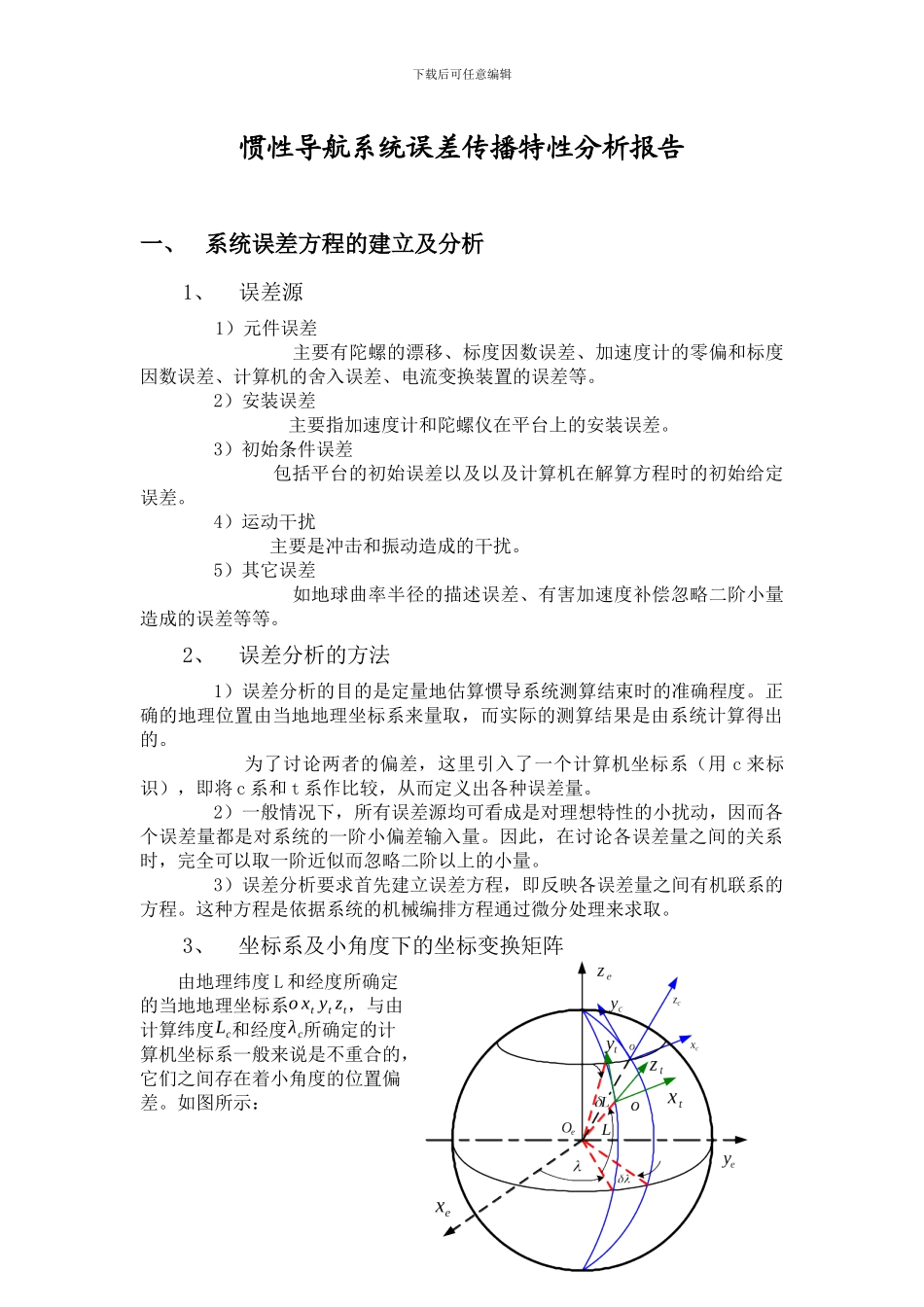
3、坐标系及小角度下的坐标变换矩阵由地理纬度 L 和经度所确定的当地地理坐标系o xt yt zt,与由计算纬度Lc和经度λc所确定的计算机坐标系一般来说是不重合的,它们之间存在着小角度的位置偏差
如图所示:下载后可任意编辑以指北方位系统为例,其平合坐标系 p 与地理坐标系 t 一般来说也存在着小角度的位置偏差
同样,p 系与 c 系之间也存在着小角度的位置偏差
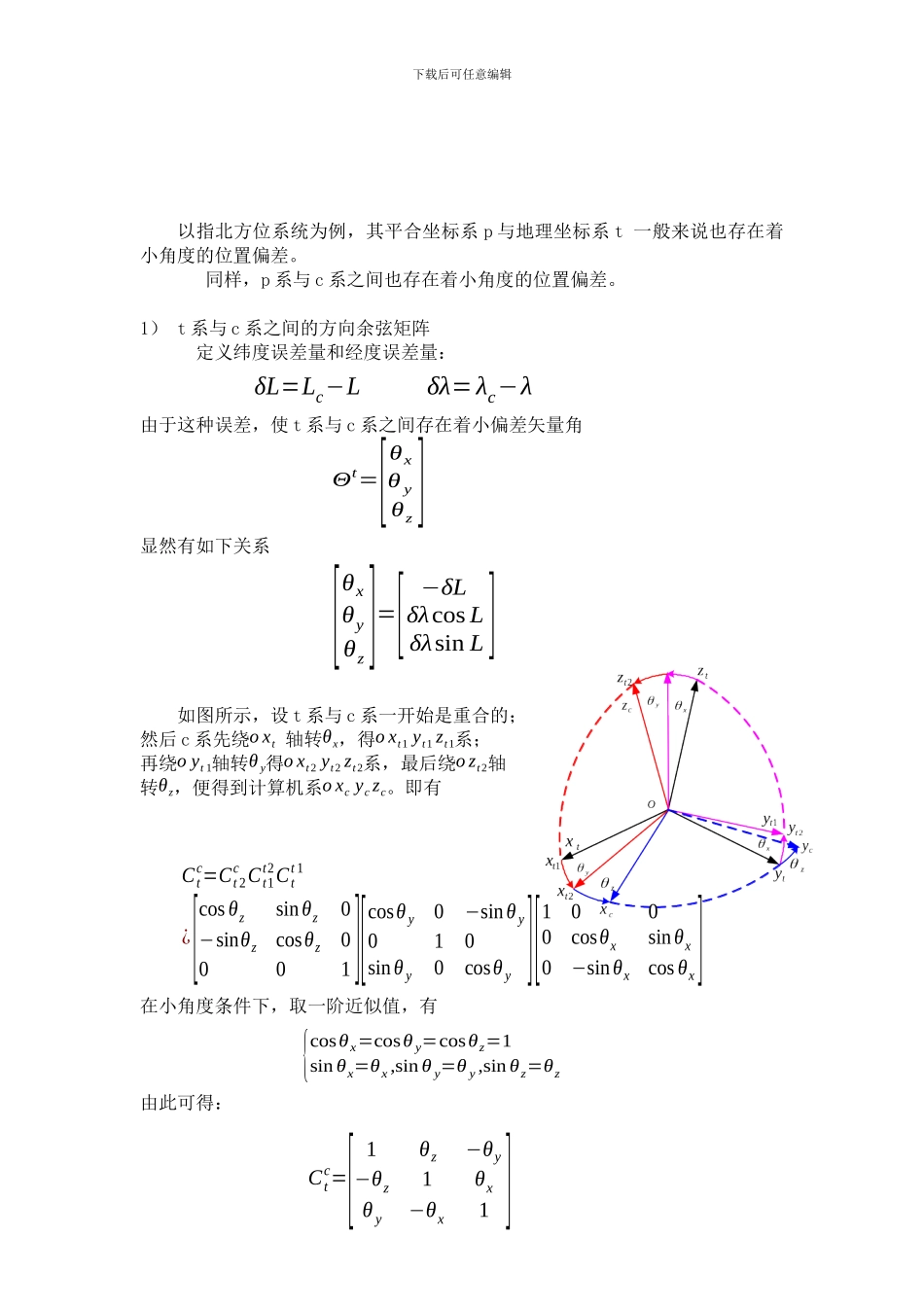
1) t 系与 c 系之间的方向余弦矩阵 定义纬度误差量和经度误差量:由于这种误差,使 t 系与 c 系之间存在着小偏差矢量角显然有如下关系如图所示,设 t 系与 c 系一开始是重合的;然后 c 系