第2 章 线性时不变连续系统的时域分析 2
6 本章习题全解 2
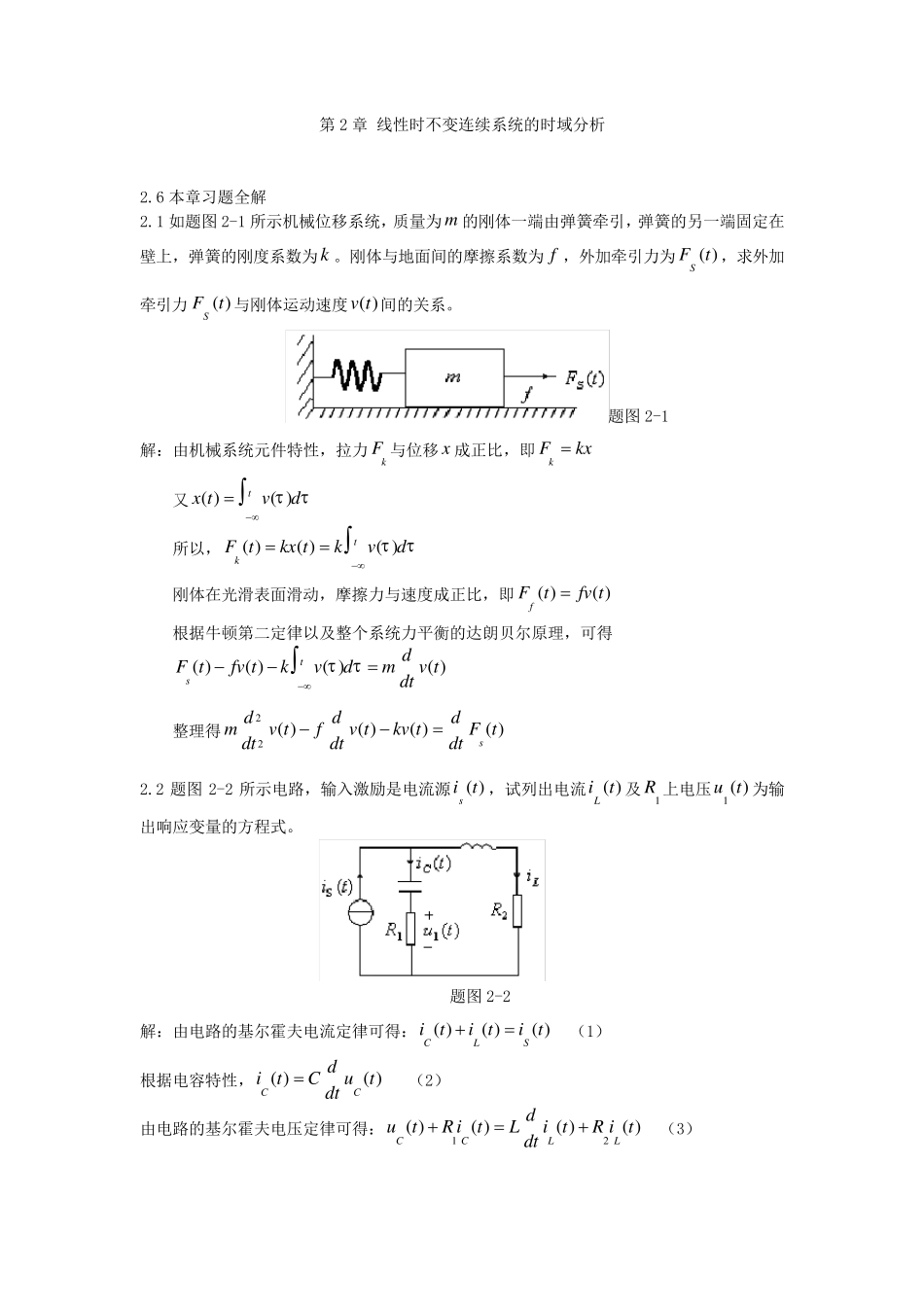
1 如题图2-1 所示机械位移系统,质量为m 的刚体一端由弹簧牵引,弹簧的另一端固定在壁上,弹簧的刚度系数为k
刚体与地面间的摩擦系数为f ,外加牵引力为)(tFS,求外加牵引力)(tFS与刚体运动速度)(tv间的关系
题图2-1 解:由机械系统元件特性,拉力kF 与位移x 成正比,即kFkx 又 ( )( )tx tvd 所以,( )( )( )tkF tkx tkvd 刚体在光滑表面滑动,摩擦力与速度成正比,即( )( )fF tfv t 根据牛顿第二定律以及整个系统力平衡的达朗贝尔原理,可得 ( )( )( )( )tsdF tfv tkvdmv tdt 整理得22( )( )( )( )sdddmv tfv tkv tF tdtdtdt 2
2 题图2-2 所示电路,输入激励是电流源)(tis,试列出电流)(tiL及1R 上电压)(1 tu为输出响应变量的方程式
题图2-2 解:由电路的基尔霍夫电流定律可得:( )( )( )CLSiti ti t (1) 根据电容特性,( )( )CCditCutdt (2) 由电路的基尔霍夫电压定律可得:12( )( )( )( )CCLLdutR itLi tR i tdt (3) 将21( )( )( )( )CLLCdutLi tR i tR itdt代入(2)得 2212( )( )( )( )CLLCddditLCi tR Ci tR Citdtdtdt(4) ( )( )( )CSLiti ti t代入(4)得, 22112( )( )( )( )( )( )SLLLSLddddi ti tLCi tR Ci tR Ci tR Ci tdtdtdtdt