MATLAB固高倒立摆系统实验 在现代控制论实验和最优控制实验中,考虑了小车位移的控制,将直线一级倒立摆当作单输入多输出系统,分别采用了极点配置法和线性二次型最优控制策略,进行控制器结构和参数设计
许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等等,都可以通过倒立摆系统实验直观的表现出来
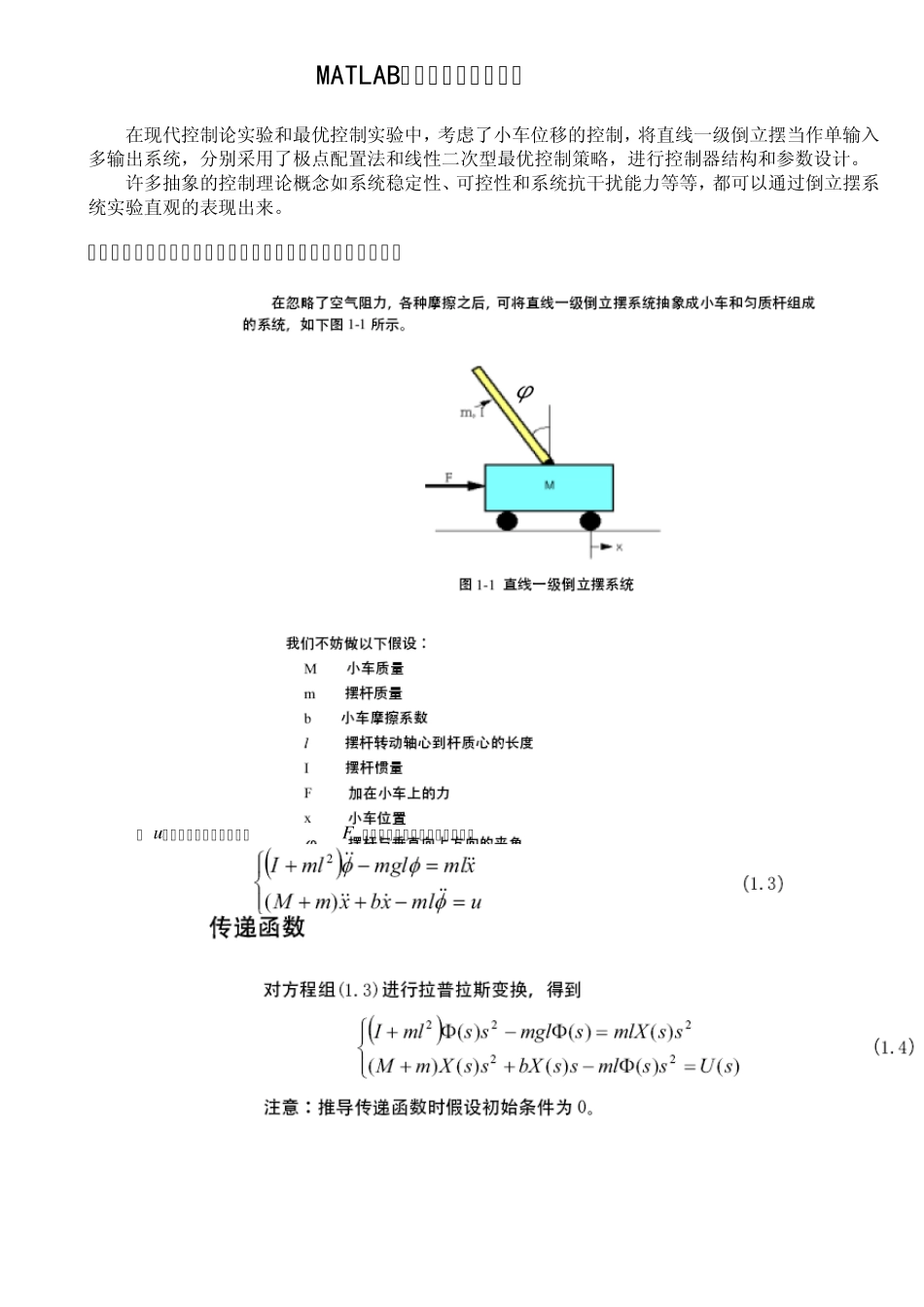
一、牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型
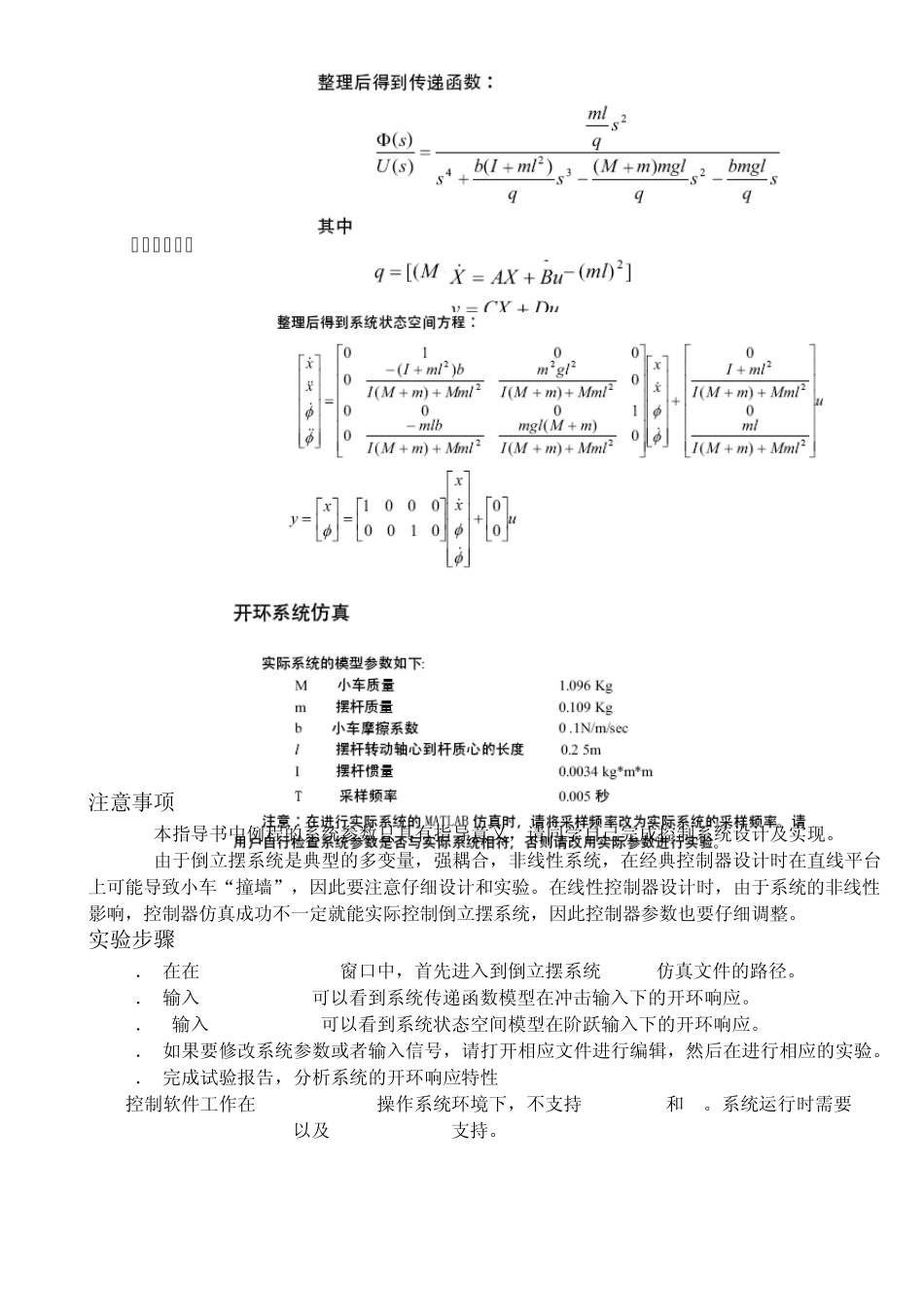
用 u来代表被控对象的输入力F ,线性化后两个运动方程如下: 状态空间方程 注意事项 1
本指导书中例程的系统参数只具有指导意义,请同学自己完成控制系统设计及实现
由于倒立摆系统是典型的多变量,强耦合,非线性系统,在经典控制器设计时在直线平台上可能导致小车“撞墙”,因此要注意仔细设计和实验
在线性控制器设计时,由于系统的非线性影响,控制器仿真成功不一定就能实际控制倒立摆系统,因此控制器参数也要仔细调整
实验步骤 1. 在在matlab command 窗口中,首先进入到倒立摆系统matlab仿真文件的路径
2. 输入pc1_open_t
m可以看到系统传递函数模型在冲击输入下的开环响应
3. 输入pc1_open_s
m可以看到系统状态空间模型在阶跃输入下的开环响应
4. 如果要修改系统参数或者输入信号,请打开相应文件进行编辑,然后在进行相应的实验
5. 完成试验报告,分析系统的开环响应特性 控制软件工作在Windows 2000 操作系统环境下,不支持Windows98和95
系统运行时需要MATLAB 6 Release 12
1 以及SIMULINK 4
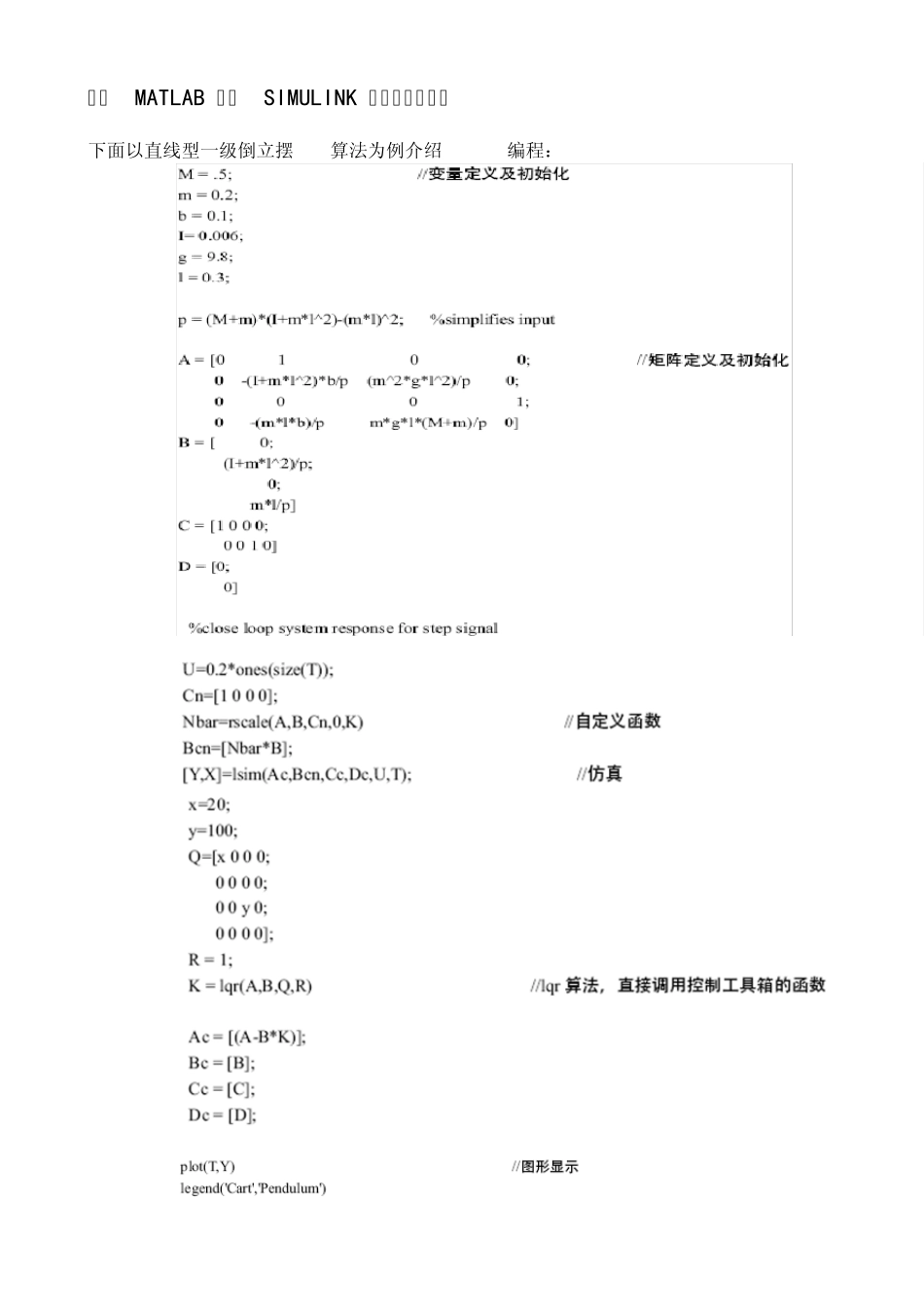
二、MATLAB 以及SIMULINK 应用的基本介绍 下面以直线型一级倒立摆LQR 算法为例介绍MATLAB 编程: 点击SIMULINK Library browser 的“File”下拉菜单,点击“File/New/Mode