实验报告2 ――光电传感器测距功能测试 1. 实验目的: ➢ 了解光电传感器测距的特性曲线; ➢ 掌握LEGO 基本模型的搭建; ➢ 熟练掌握ROBOLAB 软件; 2. 实验要求: 能够用LEGO 积木搭建小车模式,并在车头安置光电传感器
能在光电传感器紧贴红板,以垂直红板的方向作匀速直线倒车运动过程中进行光强值采集,绘制出时间-光强曲线,然后推导出位移-光强曲线及方程
3. 程序设计: 编写程序流程图并写出程序,如下所示: 开始 设置采样函数 电机转动 采样 24 次 (0
05S/次) 结束 电机停机 音乐响 ROBOLAB 程序设计: 4. 实验步骤: 1) 搭建小车模型,参考附录步骤或自行设计(创新可加分)
2) 用ROBOLAB 编写上述程序
3) 将小车与电脑用USB 数据线连接,并打开NXT 的电源
点击ROBOLAB的RUN 按钮,传送程序
4) 取一红颜色的纸板(或其他红板)竖直摆放,并在桌面平面与纸板垂直方向放置直尺,用于记录小车行走的位移
5) 将小车的光电传感器紧贴红板放置,用电脑或NXT 的红色按钮启动小车,进行光强信号的采样
从直尺上读取小车的位移
6) 待小车发出音乐后,点击ROBOLAB 的数据采集按钮,进行数据采集,将数据放入红色容器
共进行四次数据采集
7) 点击ROBOLAB 的计算按钮,分别对四次采集的数据进行同时显示、平均线及拟和线处理
8) 利用数据处理结果及图表,得出时间同光强的对应关系
再利用小车位移同时间的关系(近似为匀速直线运动),推导出小车位移同光强的关系表达式
5. 调试与分析 a) 采样次数设为 24,采样间隔为 0
05s,共运行1
采得数据如下所示
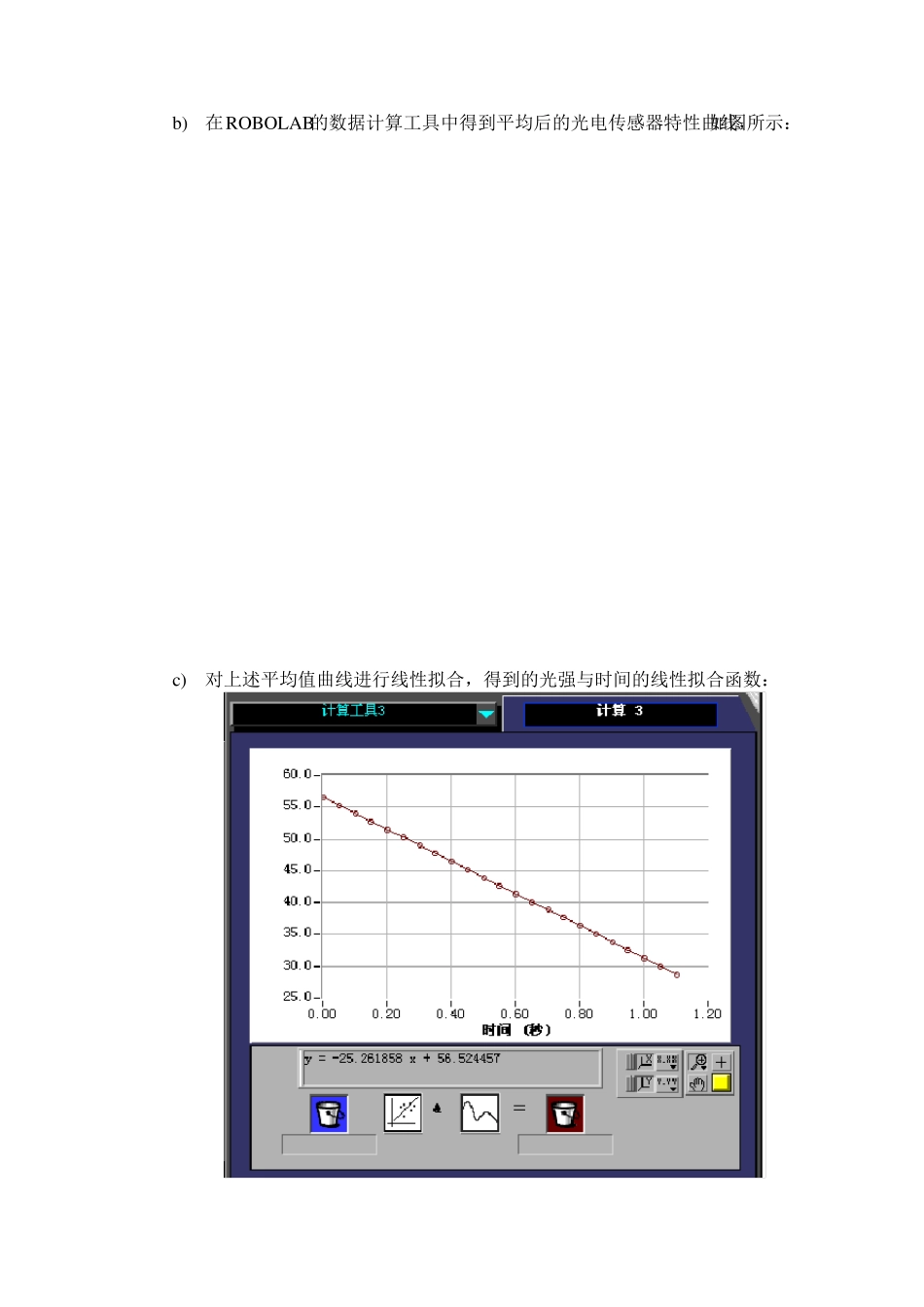
b) 在ROBOLAB的数据计算工具中得到平均后的光电传感器特性曲线,如图所示: c) 对上述平均值曲线进行线性拟合,得到的光强与时间的线