精品文档---下载后可任意编辑10-1 试判别下述结论是否正确,并说明理由:(1) 机构中每个可动构件都应该有自由度,图 10-15 所示的搅面机机构有三个可动构件,所以搅面机有三个自由度
(2) 图 10-27 中构件 1 相对于构件 2 能沿切向 At 移动,沿法向 An向上移动和绕接触点 A转动,所以构件 1 与 2 组成的运动副保留三个相对运动
(3) 图 b 中构件 1 与 2 在 A 两处接触,所以构件 1 与 2 组成两个高副
图 10-27 图 10-2810-2 如图 10-28 所示的曲轴 1 与机座 2,曲轴两端中心线不重合,加工误差为△,试问装配后两构件能否相对转动,并说明理由
10-3 局部自由度不影响整个机构运动,虚约束不限制构件独立运动,为什么实际机构中还采纳局部自由度、虚约束的结构
习 题10-1 吊扇的扇叶与吊架、书桌的桌身与抽斗,机车直线运动时的车轮与路轨,各组成哪一类运动副,请分别画出
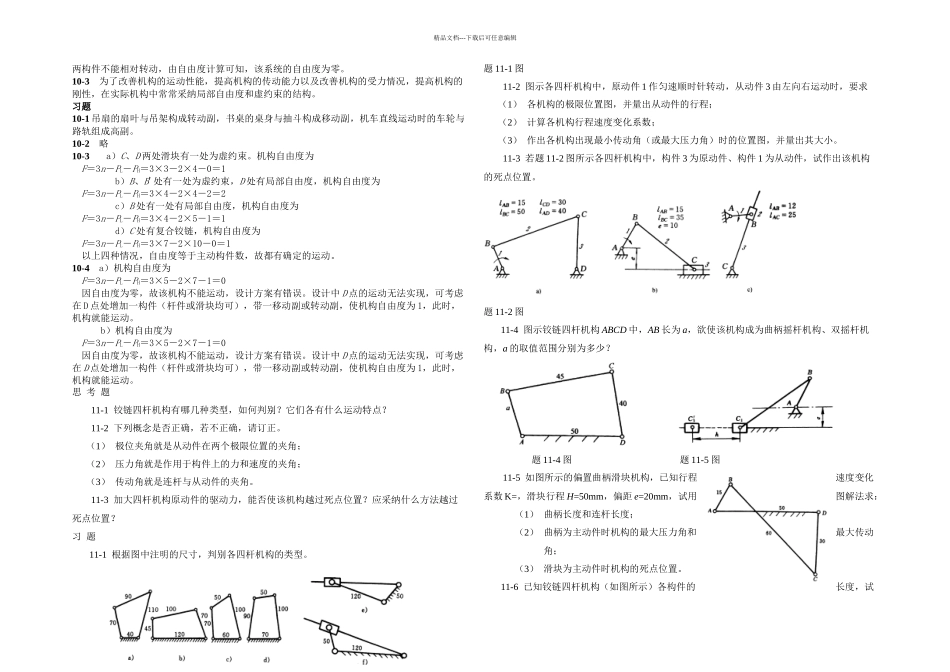
10-2 绘制图示各机构的运动简图
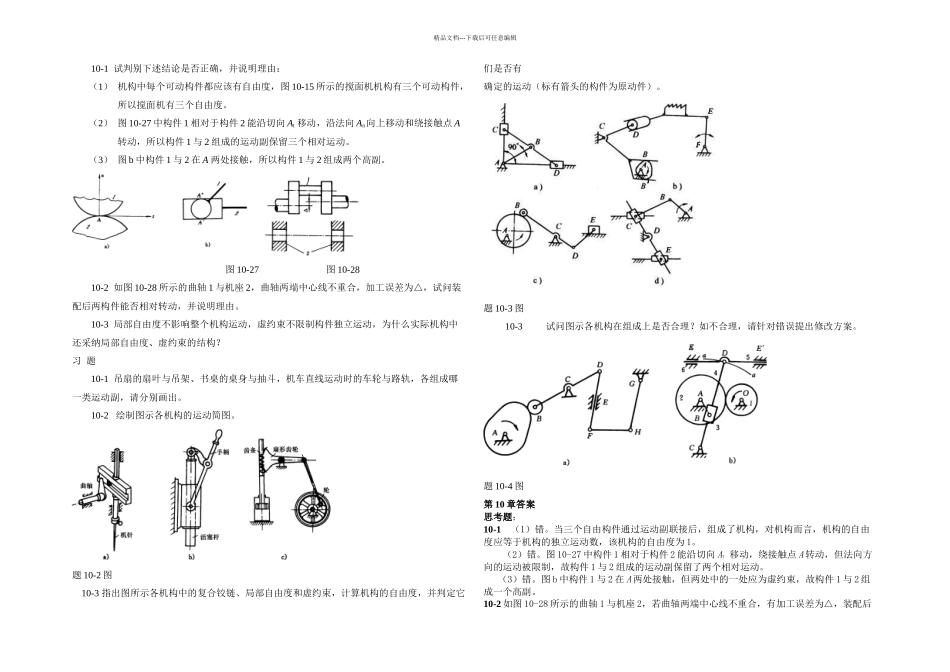
题 10-2 图 10-3 指出图所示各机构中的复合铰链、局部自由度和虚约束,计算机构的自由度,并判定它们是否有确定的运动(标有箭头的构件为原动件)
题 10-3 图10-3 试问图示各机构在组成上是否合理
如不合理,请针对错误提出修改方案
题 10-4 图第 10 章答案思考题:10-1 (1)错
当三个自由构件通过运动副联接后,组成了机构,对机构而言,机构的自由度应等于机构的独立运动数,该机构的自由度为 1
图 10-27 中构件 1 相对于构件 2 能沿切向 At 移动,绕接触点 A 转动,但法向方向的运动被限制,故构件 1 与 2 组成的运动副保留了两个相对运动
图 b 中构件 1 与 2 在 A 两处接触,但两处中的一处应为虚约束,故构件 1 与 2 组成一个高副
10-2 如图 10-