1 单神经元自适应 PID控制算法 一、单神经元 P ID 算法思想 神经元网络是智能控制的一个重要分支,神经元网络是以大脑生理研究成果为基础,模拟大脑的某些机理与机制,由人工建立的以有向图为拓扑结构的网络,它通过对连续或断续的输入做状态响应而进行信息处理;神经元网络是本质性的并行结构,并且可以用硬件实现,它在处理对实时性要求很高的自动控制问题显示出很大的优越性;神经元网络是本质性的非线性系统,多层神经元网络具有逼近任意函数的能力,它给非线性系统的描述带来了统一的模型;神经元网络具有很强的信息综合能力,它能同时处理大量不同类型的输入信息,能很好地解决输入信息之间的冗余问题,能恰当地协调互相矛盾的输入信息,可以处理那些难以用模型或规则描述的系统信息
神经元网络在复杂系统的控制方面具有明显的优势,神经元网络控制和辨识的研究已经成为智能控制研究的主流
单神经元自适应 PID控制算法在总体上优于传统的 PID控制算法,它有利于控制系统控制品质的提高,受环境的影响较小,具有较强的控制鲁棒性,是一种很有发展前景的控制器
二、单神经元自适应 PID算法模型 单神经元作为构成神经网络的基本单位,具有自学习和自适应能力,且结构简单而易于计算
传统的 PID则具有结构简单、调整方便和参数整定与工程指标联系紧密等特点
将二者结合,可以在一定程度上解决传统 PID调节器不易在线实时整定参数,难以对一些复杂过程和参数时变、非线性、强耦合系统进行有效控制的不足
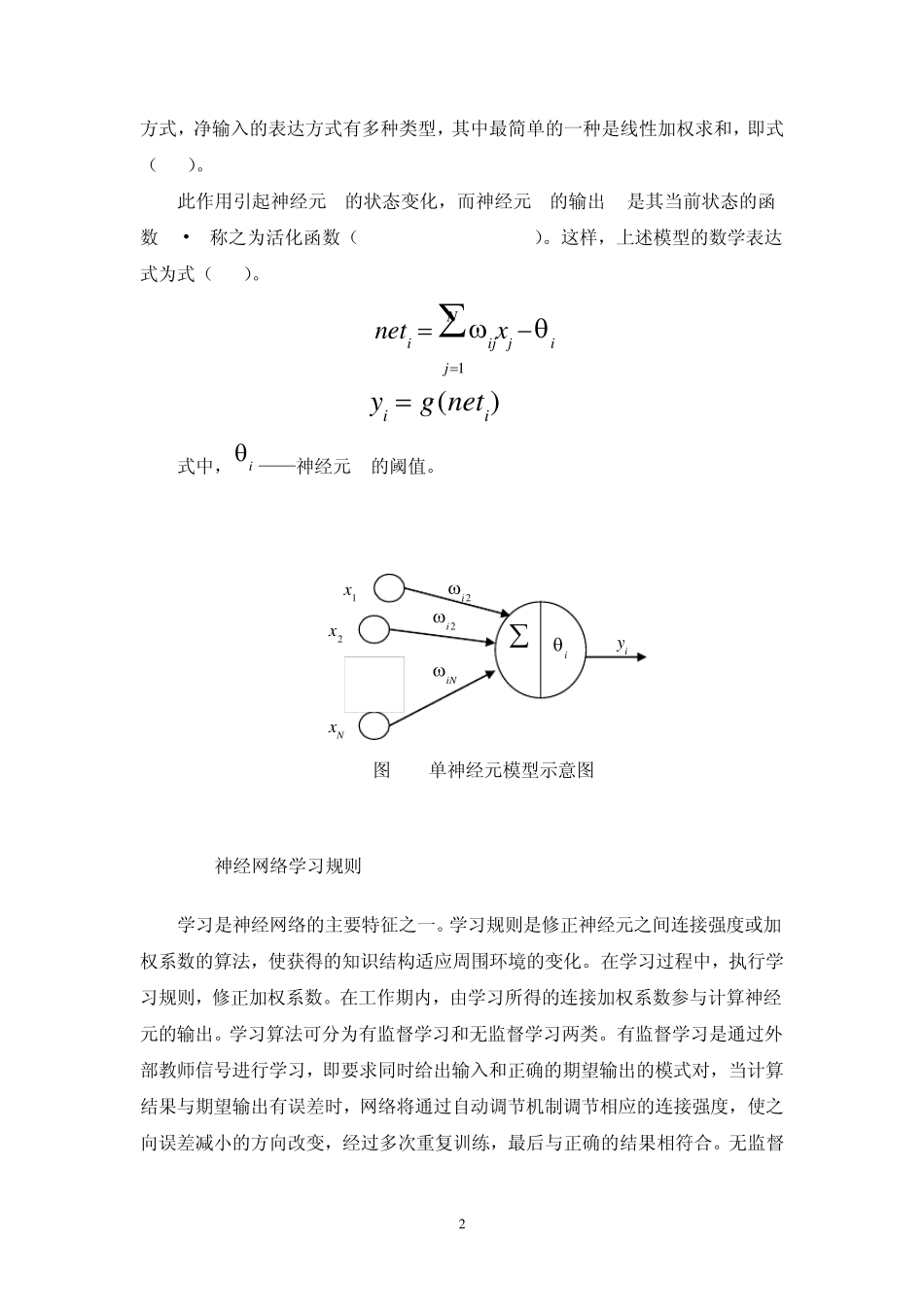
1单神经元模型 对人脑神经元进行抽象简化后得到一种称为 McCulloch-Pitts模型的人工神经元,如图 2-1所示
对于第i个神经元,12Nxxx、、……、是神经元接收到的信息,12iiiN、、……、为连接强度,称之为权
利用某种运算把输入信号的作用结合起来,给它们的总效果,称之为“净输入”,用inet 来表示
根据不同的运