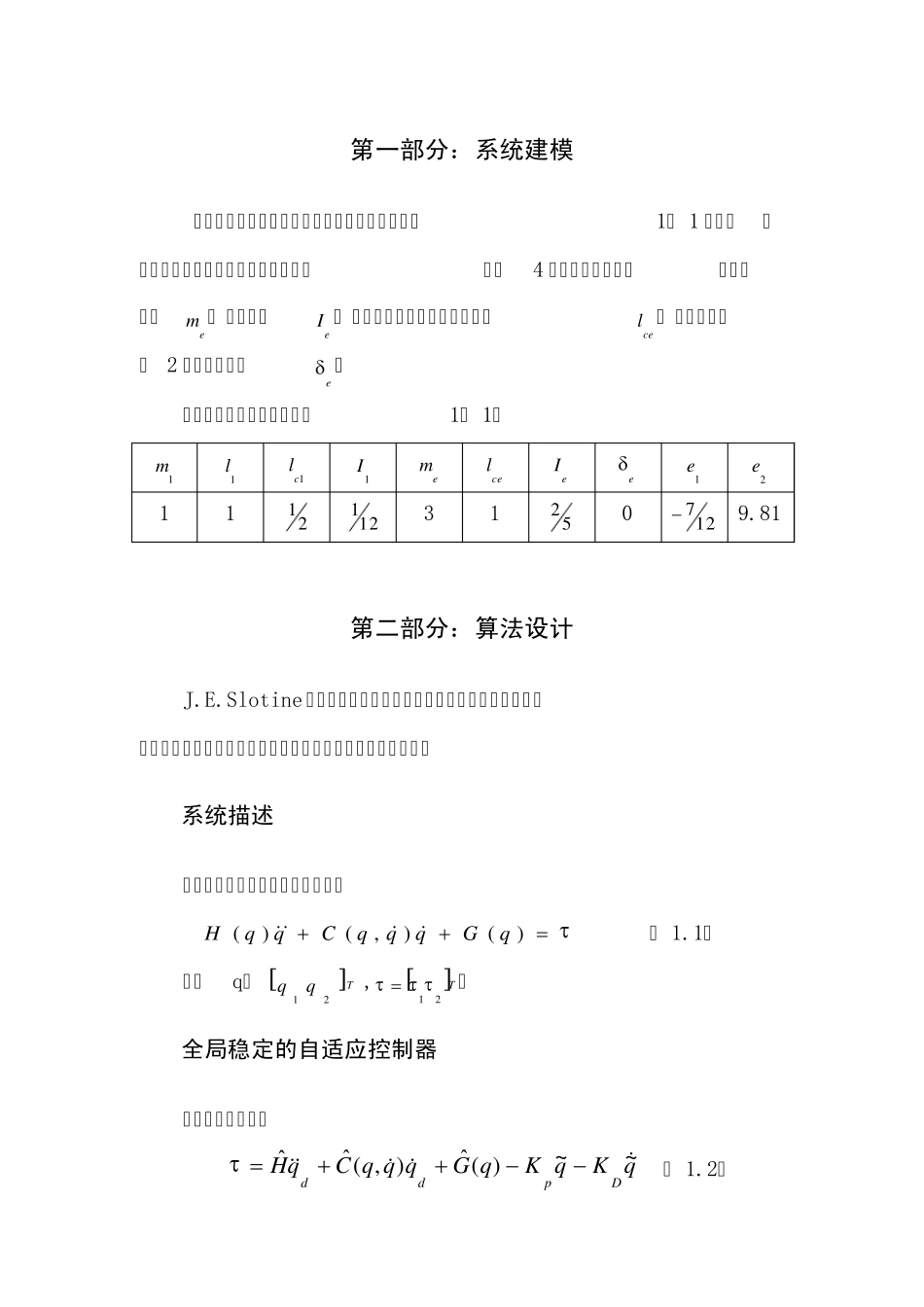
第一部分:系统建模 一个带有未知负载的两关节平面机械臂结构如图1- 1 所示
第二个关节连同负载可视为一个整体,具有4 个未知物理参数,分别为质量em 、 转动惯量eI 、 质量中心距第二关节处的距离cel , 质量中心与第 2 机械臂的夹角e
机械臂的实际物理参数见表1- 1
1m 1l 1cl 1I em cel eI e 1e 2e 1 1 21 121 3 1 52 0 127 9
81 第二部分:算法设计 J
Slotine 等提出了一种著名的机器人力臂自适应控制设计方法,该方法对后来机器人自适应控制的研究起了重要的作用
1系统描述 双关节机械臂动力学方程可写为: )(),()(qGqqqCqqH ( 1
1) 其中q= Tqq21,T21
2全局稳定的自适应控制器 设计控制律如下: qKqKqGqqqCqHDpdd~~)(ˆ),(ˆˆ ( 1
2) 其中pK 为对称正定距阵;DK 为正定距阵;Hˆ ,Cˆ ,Gˆ 为H, C, G的估计距阵
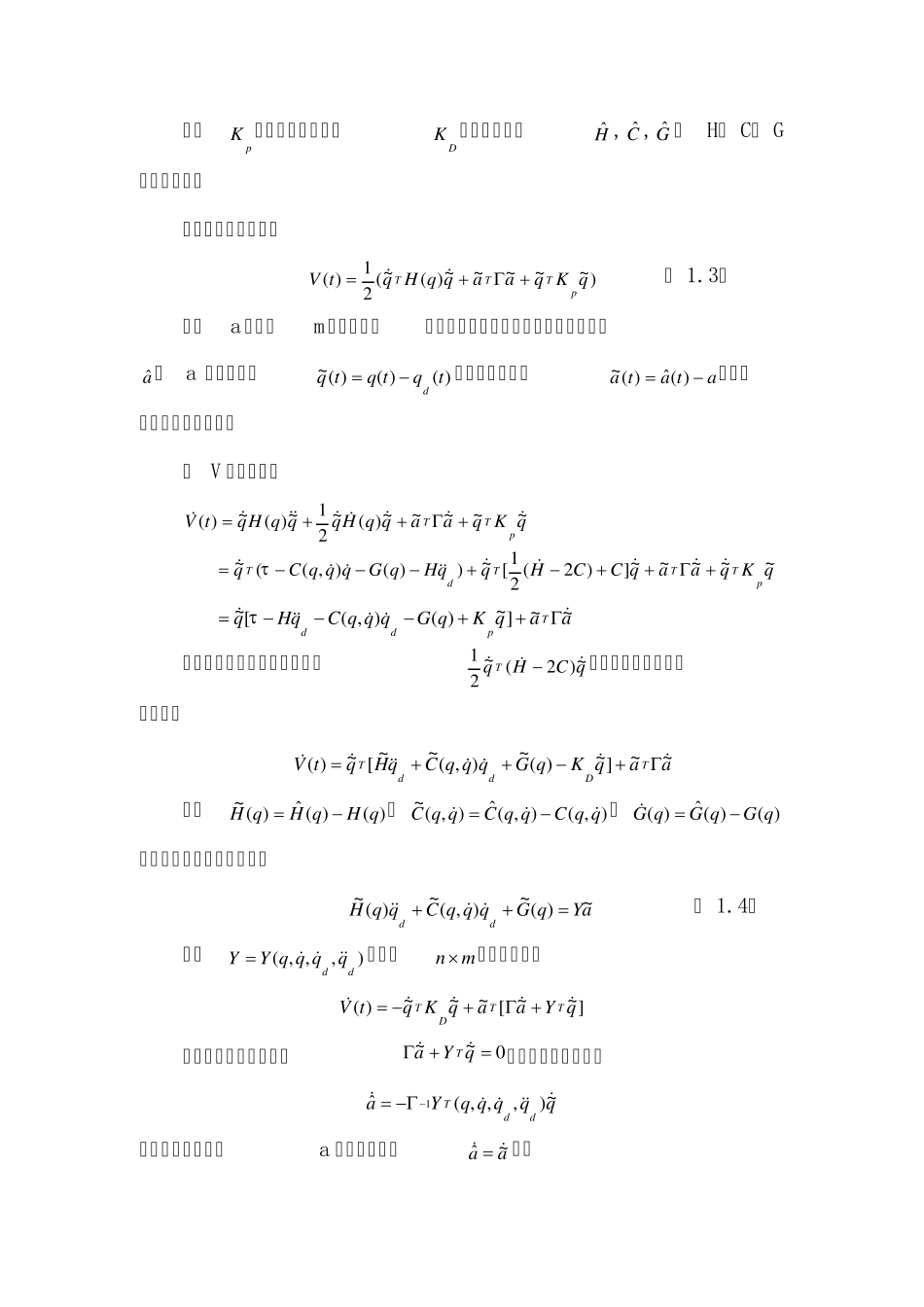
考虑李雅普诺夫函数 )~~~~~)(~(21)(qKqaaqqHqtVpTTT ( 1
3) 其中a 是一个m 维的向量,包括未知的机械臂参数和负载的参数,aˆ 是a 的估计值;)()()(~tqtqtqd表示跟踪误差;atata)(ˆ)(~表示估计参数误差的向量
对 V 求导数,得 qKqaaqqHqqqHqtVpTT~~~~~)(~21~)(~)( qKqaaqCCHqqHqGqqqCqpTTTdT~~~~~])2(21[~))(),((~ aaqKqGqqqCqHqTpdd~~]~)(),([~ 利用机器人的斜对称特