设 计 任 务 书 某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下: 直流电动机:VUN750,AIN780,min/375rnN ,04
0aR,电枢电阻总电阻R=0
1 ,电枢电路总电感L=3
0mH,电流允许过载倍数5
1,折算到电动机轴的飞轮惯量224
11094 NmGD
晶闸管整流装置放大倍数75sK,滞后时间常数sTs0017
0 电流反馈系数)5
1/12(/01
0NIVAV 电压反馈系数)/12(min/032
0NnVrV 滤波时间常数取sTsTonoi02
0 VUUUcmimnm12**;调节器输入电阻KRo40
设计要求: 稳态指标:无静差 动态指标:电流超调量σi ≤5%;采用转速微分负反馈使转速超调量等于 0
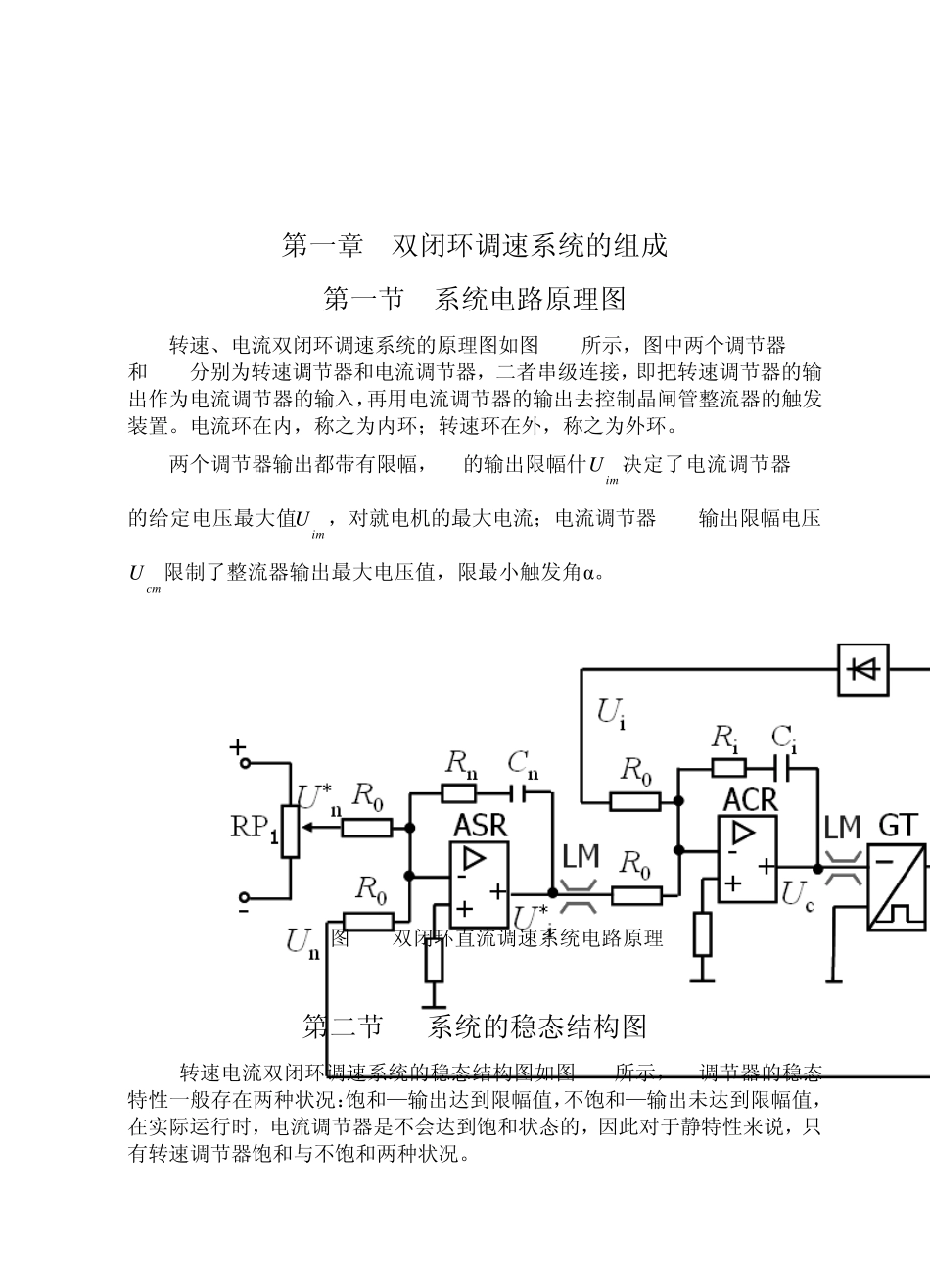
目 录 第一章 双闭环调速系统的组成 …………………1 第一节 系统电路原理图…………………………1 第二节 系统的稳态结构图 ……………………1 第三节 系统的动态结构图………………………4 第二章 闭环系统调节器的设计……………………7 第一节 电流调节器的设计 ……………………7 第二节 转速调节器的设计 ……………………12 第三章 系统的仿真 ………………………………17 参考文献………………………………………………21 第一章 双闭环调速系统的组成 第一节 系统电路原理图 转速、电流双闭环调速系统的原理图如图1-1所示,图中两个调节器ASR和ACR分别为转速调节器和电流调节器,二者串级连接,即把转速调节器的输出作为电流调节器的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置
电流环在内,称之为内环;转速环在外,称之为外环
两个调节器输出都带有限幅,ASR的输出限幅什imU决定了电流调节器ACR的给定电压最大值imU,对就电