武汉理工大学《运动控制系统》课程设计说明书 1 双闭环调速系统调节器设计及 matlab仿真验证 1 设计内容及要求 1
1 设计内容 不可逆的生产设备,采用双闭环调速系统,其整流装置采用三相桥式整流电路,系统的基本数据如下:直流电动机: 750nomUV, 760nomIA, 375minnomnr,1
82mineCVr,允许过载倍数1
5 ;时间常数:0
031LTs,0
112mTs;晶闸管放大倍数:75sK;主回路总电阻:0
14R ;额定转速时的给定电压*10nUV,调节器ASR 、 ACR 饱和输出回路电压*10imUV,10cmUV
2 设计要求 (1)控制电路的设计,包括系统参数的选取、电流环的设计,速度环的设计
(2)稳态要求:稳态无静差
(3)动态要求:电流超调量5%i,空载启动到额定转速时的转速超调量10%n
(4)用matlab对双闭环系统仿真,绘制调速系统稳定运转时转速环突然断线仿真框图
(5)撰写设计说明书
2 双闭环直流调速系统的工作原理 双闭环(转速环、电流环)直流调速系统是一种当前应用广泛,经济,适用的电力传动系统
它具有动态响应快、抗干扰能力强的优点
我们知道反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制
采用转速负反馈和 PI调节器的单闭环调速系统可以在保证系统稳定的条件下实现转速无静差
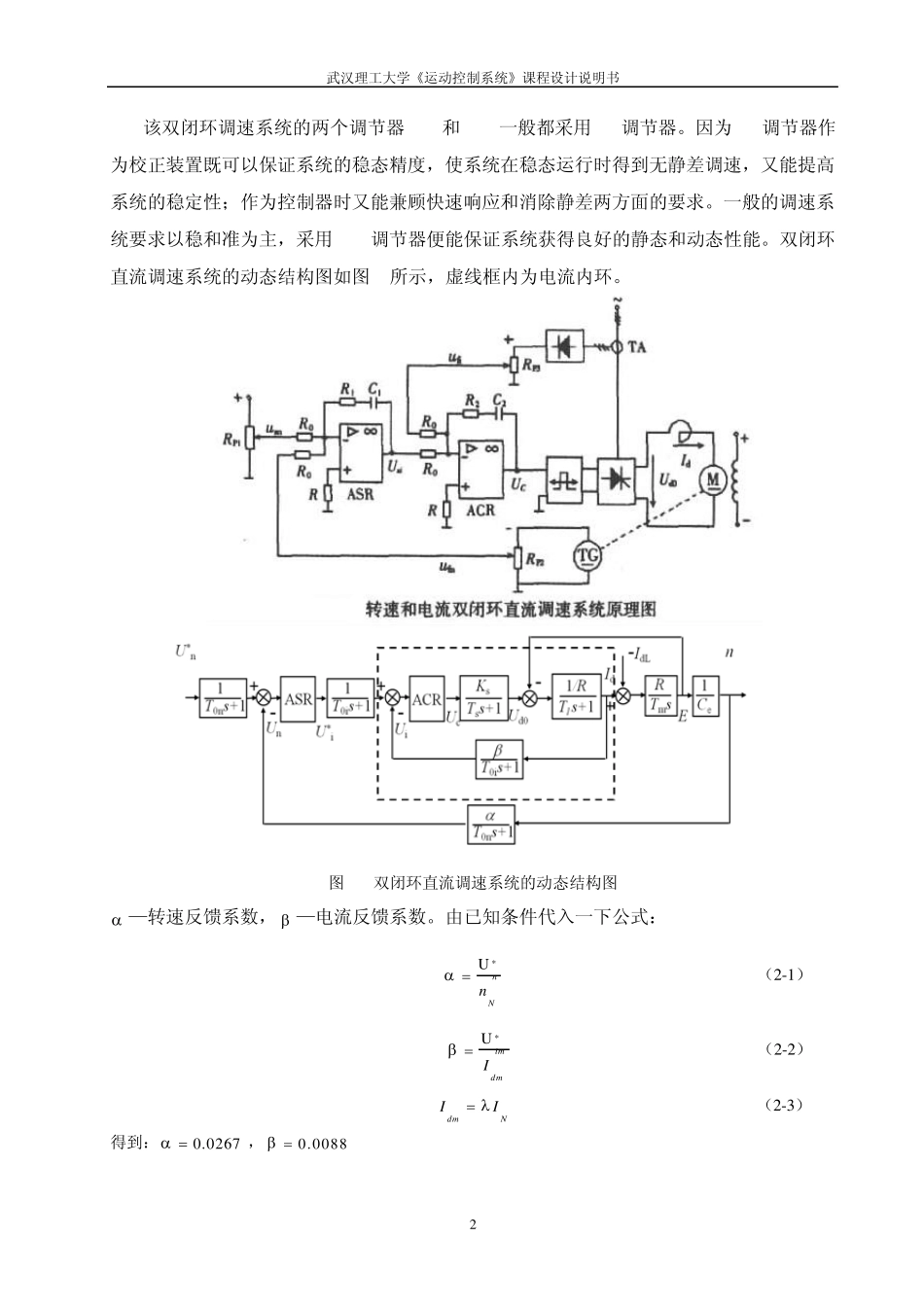
1双闭环直流调速系统的组成 为了实现转速和电流两种负反馈分别起作用,在系统中设置了两个调节器,分别调节转速和电流,二者之间实行串级连接
如图 1所示,即把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置
从闭环结构上看,电流调节环在里面,叫做内环;转速环在外面,叫做外环
这样就形成了转速、电流双闭环调速系统