第 1 篇 反馈控制的基本原理 过程控制系统——应用、设计与整定(第 3 版) 2 第 1 章 控制回路中的动态环节 1
1 负反馈 图 1
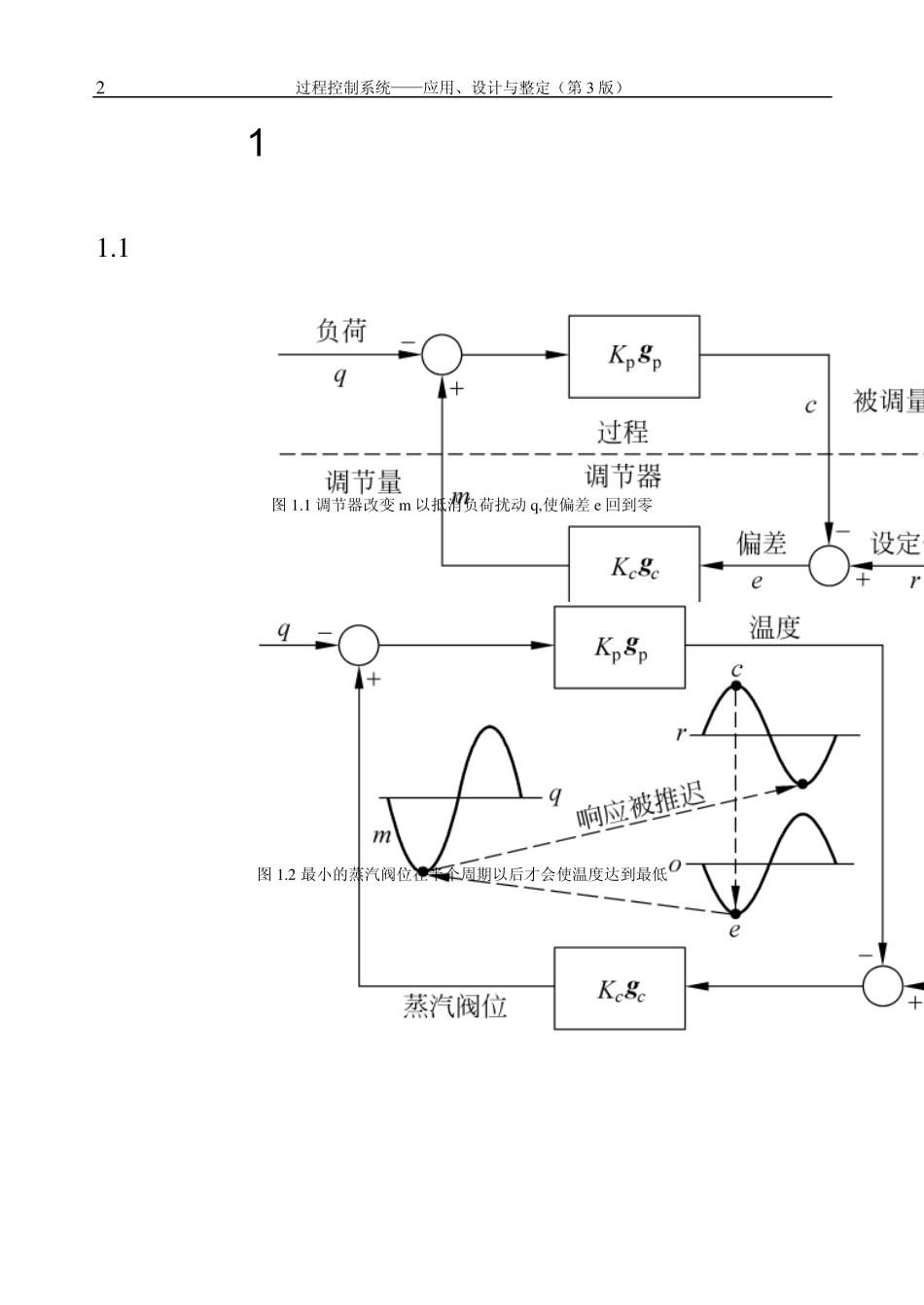
1 调节器改变 m 以抵消负荷扰动 q,使偏差 e 回到零 闭环中的振荡 图 1
2 最小的蒸汽阀位在半个周期以后才会使温度达到最低 过程控制系统——应用、设计与整定(第 3 版) 3 振 荡 周 期 衰 减 1
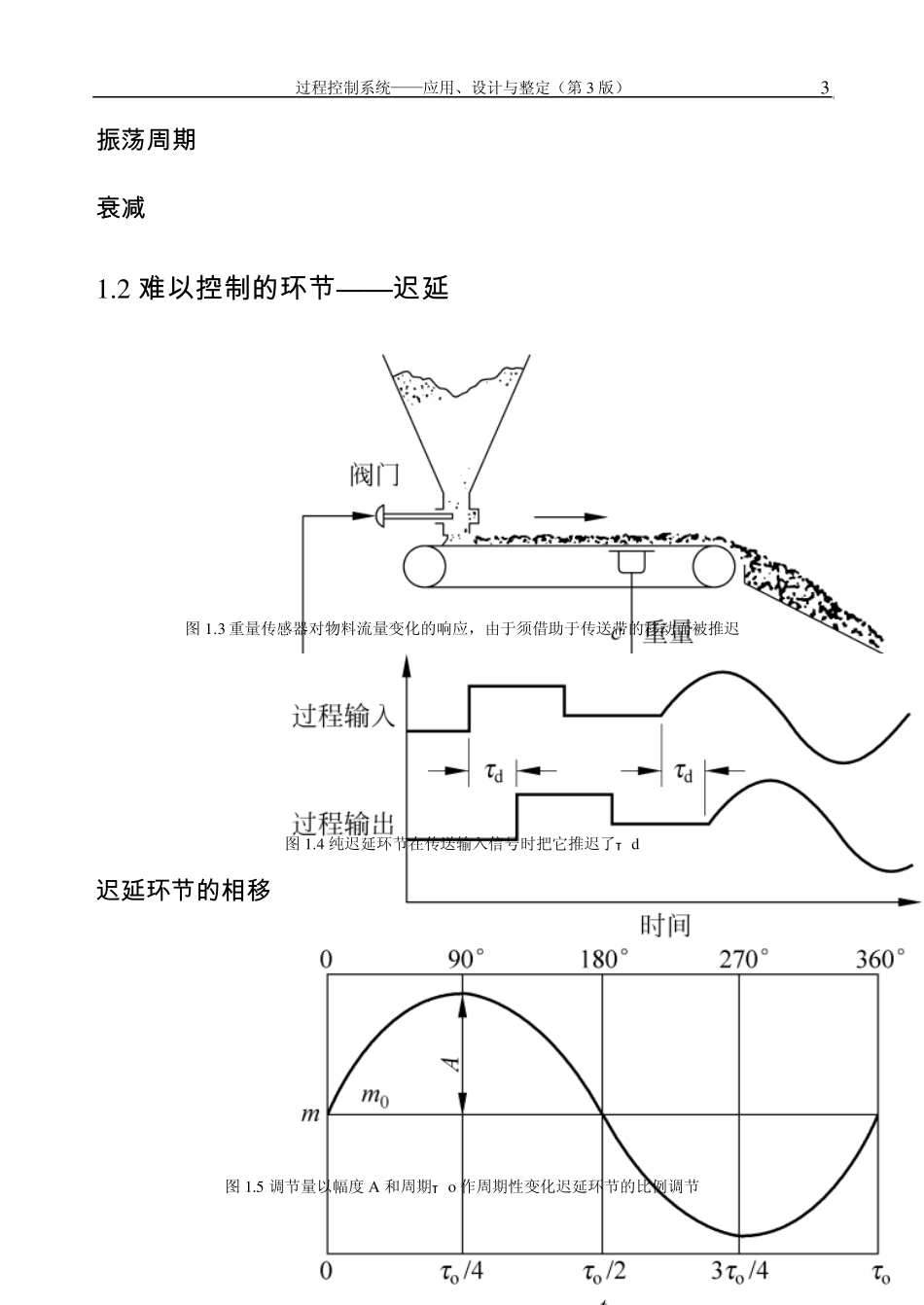
2 难 以 控 制 的 环 节 ——迟延 图 1
3 重量传感器对物料流量变化的响应,由于须借助于传送带的移动而被推迟 图 1
4 纯迟延环节在传送输入信号时把它推迟了τ d 迟延环 节 的 相移 图 1
5 调节量以幅度 A 和周期τ o作周期性变化迟延环节的比例调节 过程控制系统——应用、设计与整定(第 3 版) 4 图 1
6 回路增益为 0
5 时,该过程将出现 1/4 幅度衰减;这里 Kp>1
0 比 例残差 图 1
7 从时间为零开始负荷以等速下降 20%将产生一个锯齿波响应,它的衰减度和残差是相关的 过程控制系统——应用、设计与整定(第 3 版) 5 迟 延 环 节 的 积 分(重定)调节 图 1
8 经过时间 I 后,积分器输出的变化量等于其输入偏差量 图 1
9 积分时间改变了衰减度和振荡周期,这里 Kp仍大于 1 过程控制系统——应用、设计与整定(第 3 版) 6 图 1
1 0 与图 1
7 中同样等速下降 2 0 %的负荷,在采用积分调节时产生一个较大、较长的波动 衰 减的波动 图 1
1 1 迟延过程采用积分调节时,振荡周期将随衰减度的增大而加长,而对于给定的衰减 度,回路增益将大于采用比例调节时的数值 过程控制系统——应用、设计与整定(第 3 版) 7 比 例积分调节 图 1
1 2 比例积分调节器的动态增益是比例矢量与积分矢量之和 图 1
1 3 比例积分调节器消除了残差,而在振荡周期