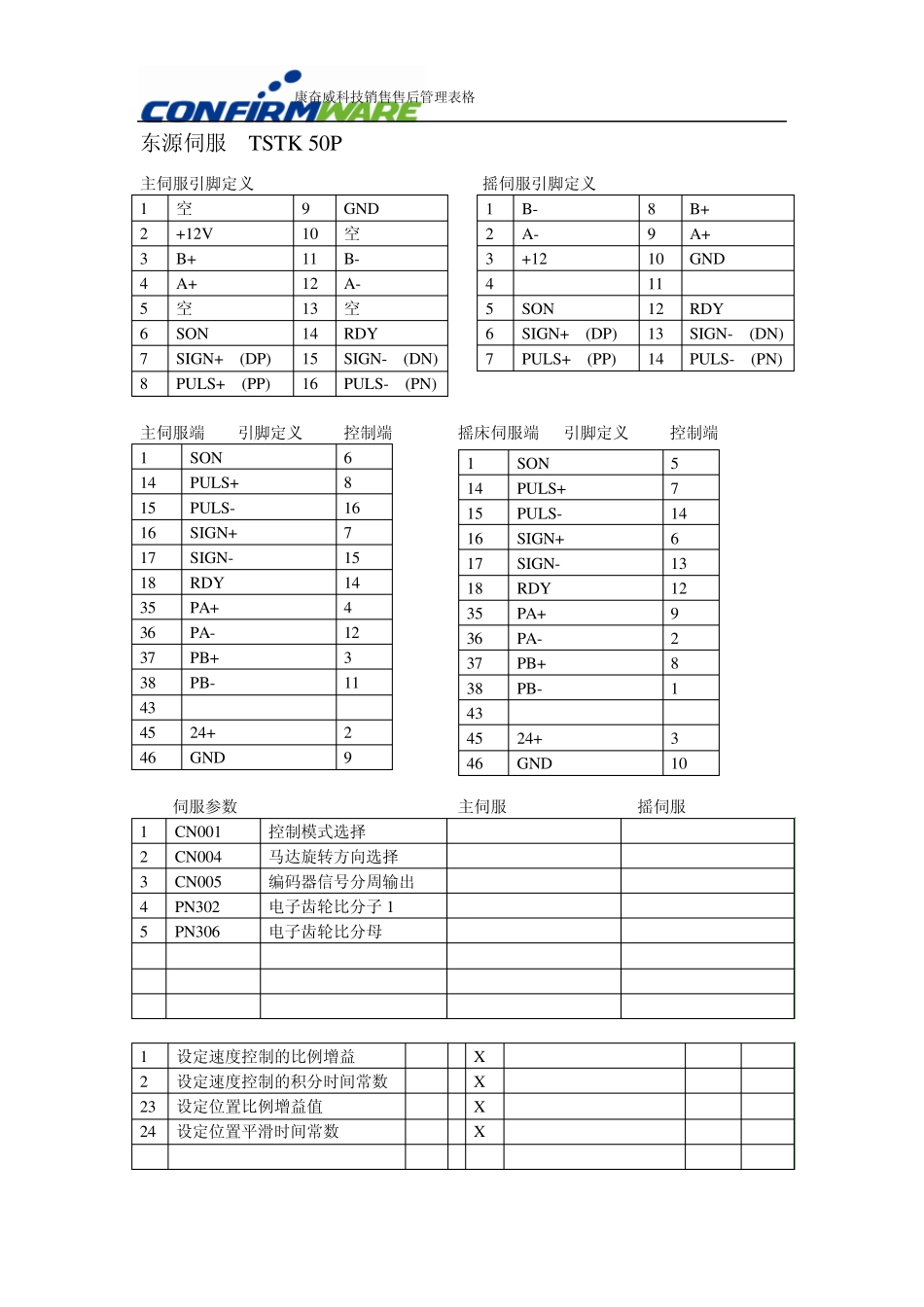
康奋威科技销售售后管理表格 东源伺服 TSTK 50P 主伺服引脚定义 摇伺服引脚定义 1 空 9 GND 2 +12V 10 空 3 B+ 11 B- 4 A+ 12 A- 5 空 13 空 6 SON 14 RDY 7 SIGN+ (DP) 15 SIGN- (DN) 8 PULS+ (PP) 16 PULS- (PN) 主伺服端 引脚定义 控制端 摇床伺服端 引脚定义 控制端 1 SON 6 14 PULS+ 8 15 PULS- 16 16 SIGN+ 7 17 SIGN- 15 18 RDY 14 35 PA+ 4 36 PA- 12 37 PB+ 3 38 PB- 11 43 45 24+ 2 46 GND 9 伺服参数 主伺服 摇伺服 1 CN001 控制模式选择 2 CN004 马达旋转方向选择 3 CN005 编码器信号分周输出 4 PN302 电子齿轮比分子 1 5 PN306 电子齿轮比分母 1 设定速度控制的比例增益 X 2 设定速度控制的积分时间常数 X 23 设定位置比例增益值 X 24 设定位置平滑时间常数 X 1 B- 8 B+ 2 A- 9 A+ 3 +12 10 GND 4 11 5 SON 12 RDY 6 SIGN+ (DP) 13 SIGN- (DN) 7 PULS+ (PP) 14 PULS- (PN) 1 SON 5 14 PULS+ 7 15 PULS- 14 16 SIGN+ 6 17 SIGN- 13 18 RDY 12 35 PA+ 9 36 PA- 2 37 PB+ 8 38 PB- 1 43 45 24+ 3 46 GND 10 康奋威科技销售售后管理表格 东能伺服 EPS 36P 主伺服引脚定义 摇伺服引脚定义 1 空 9 GND 2 +12V 10 空 3 B+ 11 B- 4 A+ 12 A- 5 空 13 空