精品文档---下载后可任意编辑摘要本设计为以 AVR mega128 为主控制器的智能小车控制系统
小车系统由红外线循迹模块、L298N 电机控制模块、电源模块组成、小车转速计数模块
小车供电系统采纳电池组供电
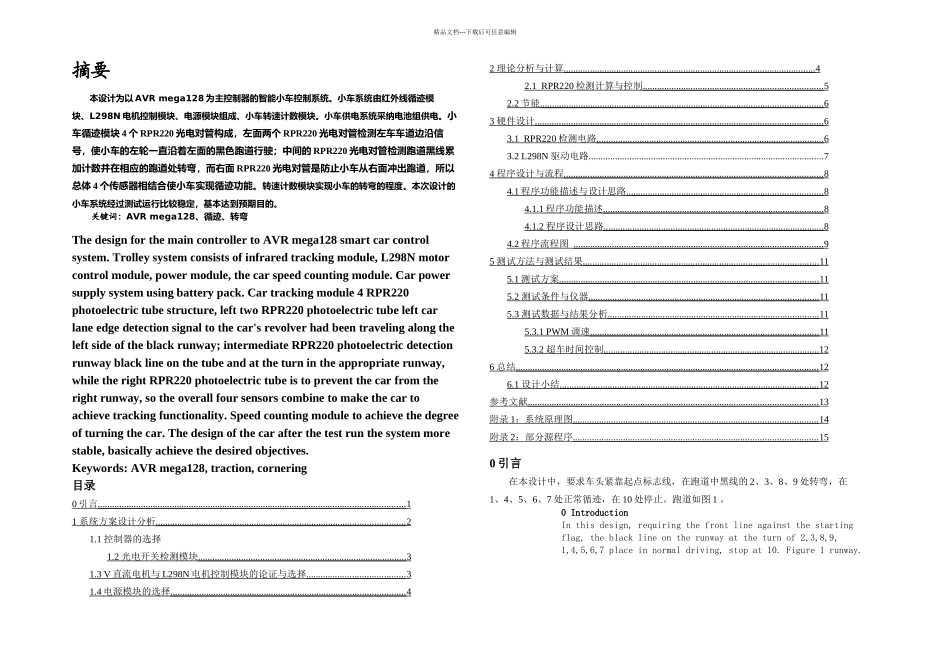
小车循迹模块 4 个 RPR220 光电对管构成,左面两个 RPR220 光电对管检测左车车道边沿信号,使小车的左轮一直沿着左面的黑色跑道行驶;中间的 RPR220 光电对管检测跑道黑线累加计数并在相应的跑道处转弯,而右面 RPR220 光电对管是防止小车从右面冲出跑道,所以总体 4 个传感器相结合使小车实现循迹功能
转速计数模块实现小车的转弯的程度
本次设计的小车系统经过测试运行比较稳定,基本达到预期目的
关键词:AVR mega128、循迹、转弯The design for the main controller to AVR mega128 smart car control system
Trolley system consists of infrared tracking module, L298N motor control module, power module, the car speed counting module
Car power supply system using battery pack
Car tracking module 4 RPR220 photoelectric tube structure, left two RPR220 photoelectric tube left car lane edge detection signal to the car's revolver had been traveling along the left side of the black runway; inte