参赛密码(由组委会填写)全第十一届华为杯全国讨论生数学建模竞赛学校参赛队号队员姓名参赛密码(由组委会填写)第十一届华为杯全国讨论生数学建模竞赛题目机动目标跟踪与反跟踪摘要:本文讨论地面雷达对机动目标的跟踪以及目标反跟踪的相关问题
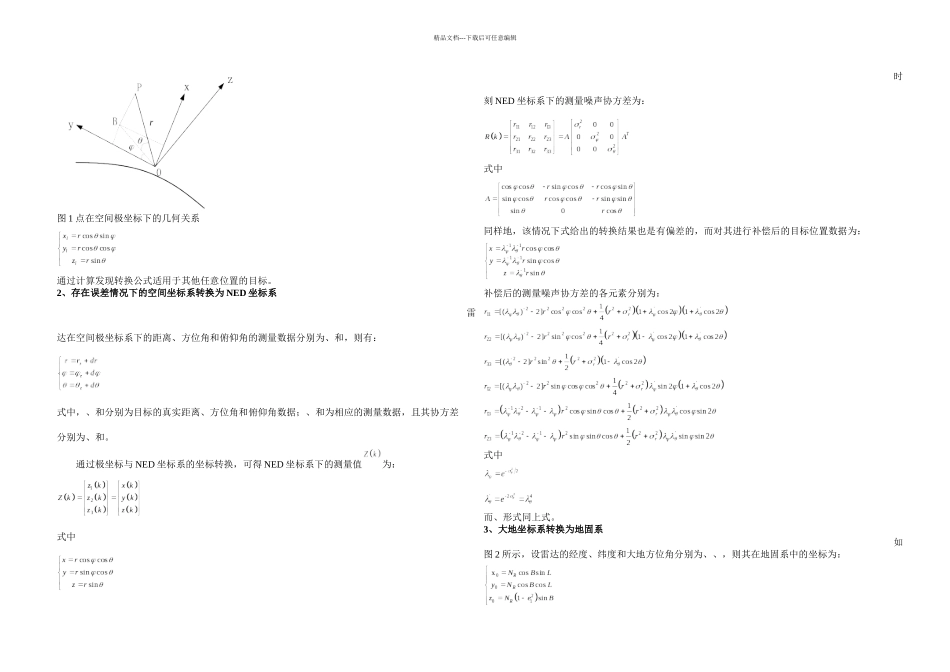
首先,本文建立了三个坐标系,空间极坐标系、NED 坐标系和地固系
其中雷达的测量值是在极坐标系中获得的;NED 坐标系原点在雷达中心处,N 为地理指北方向,E 为地球自转切线方向,D为地心指向雷达中心方向;最终将不同雷达测量的数据转换到地固系中,便于计算和讨论
第一问,首先对 3 个雷达的观测数据进行坐标系转换,转换到地固系;然后进行了数据的预处理,包括剔除野值等工作;针对目标做变加速运动建立了机动目标“当前” 统计模型与自适应跟踪算法来对目标进行跟踪并估量了全程的航迹;通过跟踪的滤波结果可以得到目标基本全程都有机动,大的机动时间段在 31740s~372000s 之间
文中还用匀加速的 Kalman 滤波算法进行目标跟踪,用以和“当前”统计模型进行效果比较,结果可以看出“当前”统计模型对变加速跟踪的有良好的效果
第二问,简化到了二维平面进行处理
首先,建立了两个目标的航迹起始;然后利用第一问建立的“当前”统计模型并结合“最近邻域法”实现数据关联,得到两个目标的航迹;对于雷达一段时间只有一个回波点迹的情况进行分析,得到避开航迹丢失的应对策略,即适当增大波门,或者增大滤波设置的方差
第三问,基于 UKF 滤波算法将雷达对弹道目标的观测数据进行滤波估量,得到估量后的弹道轨迹,并通过估量的轨迹,求取了关于合速度、合成加速度大小随时间的变化情况
我们发现加速度在 2范围内变化;同时,我们利用 “当前”统计模型实现对弹道目标的轨迹的实时预测
第四问,利用广义 Kalman 滤波法求得雷达测量目标当前时刻最优状态估值,以此为初值,用ODE45 数值积分法,通过