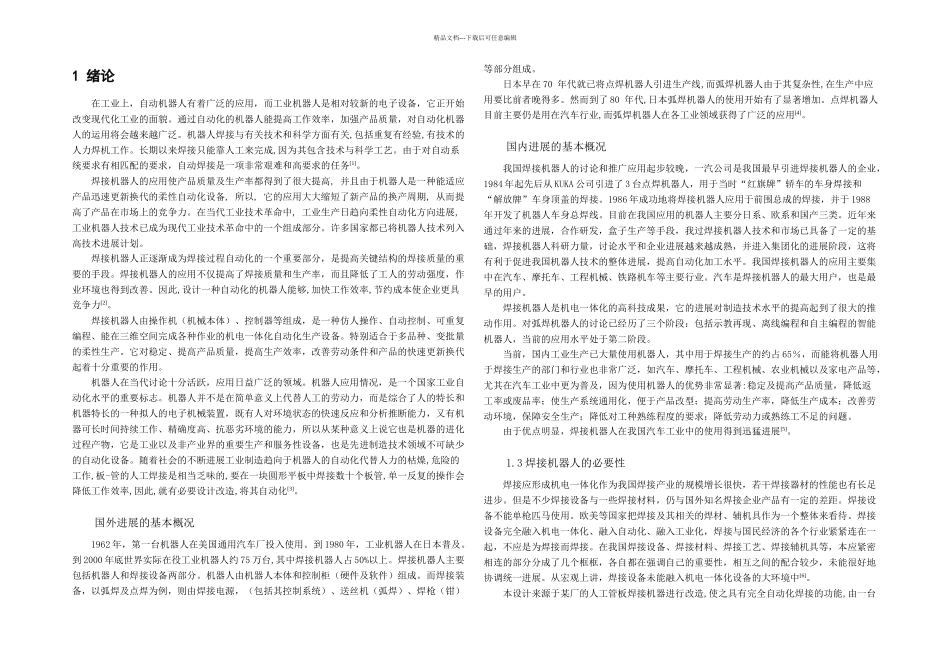
精品文档---下载后可任意编辑本设计为三自由度的焊接机器人,其机械手为一悬挂的焊枪进行作业
每个方向上都由电机带动滚珠丝杠旋转,由滚珠丝杠带动平台运动
实现直线上的运动
并且在 PLC 的控制下,进行自动化运行
步进电动机是一种用电脉冲信号进行控制,并将脉冲信号转换成相应的角位移或直线位移的执行器
PLC 对步电动机也有良好的控制能力,通过对 PLC 内置脉冲输出功能和设置相应的控制指令可以很好地控制步进电机
关键词:PLC,焊接机器人,步进电机ABSTRACTThe three degrees of freedom welding robot has three directions,and the welding torch instead of the hand of robot
It can be run automaticly under the PLC contraller
Key words:PLC,welding robots,目录1 绪论----------------------------------------------------------------------------------------------------------1国外焊接机器人的应用情况--------------------------------------------------------------1国内焊接机器人的应用情况--------------------------------------------------------------21
3 焊接机器人的必要性------------------------------------------------------------------------21
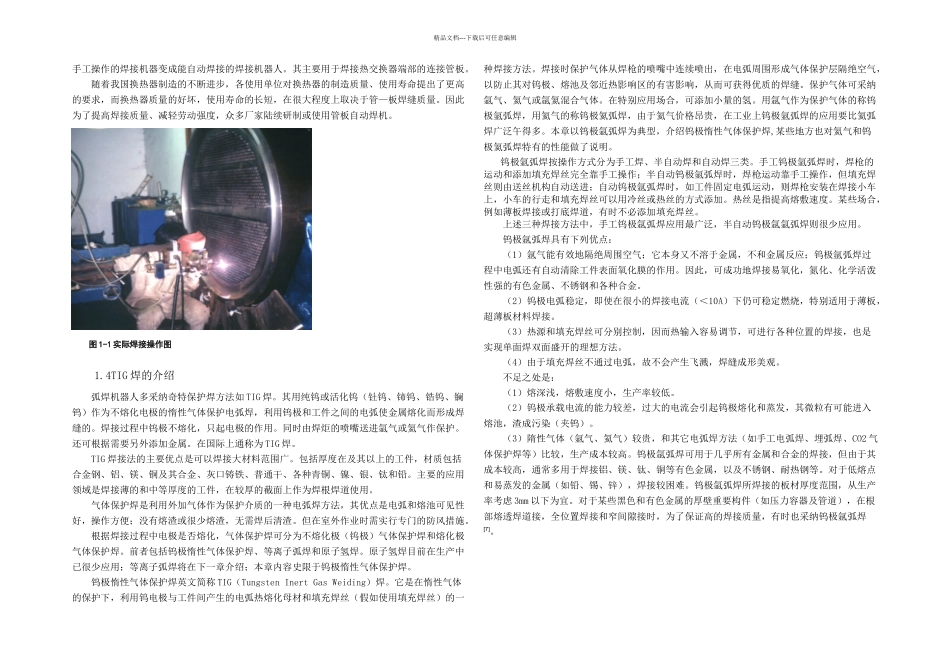
4TIG 焊的介绍------------