精品文档---下载后可任意编辑台湾国家科技大学,汽车工程专业,郑芳华和杨枯昂设计摘要:基于定位精度高,小摆角,运输时间短,高安全的要求,设计一桥式起重机控制系统
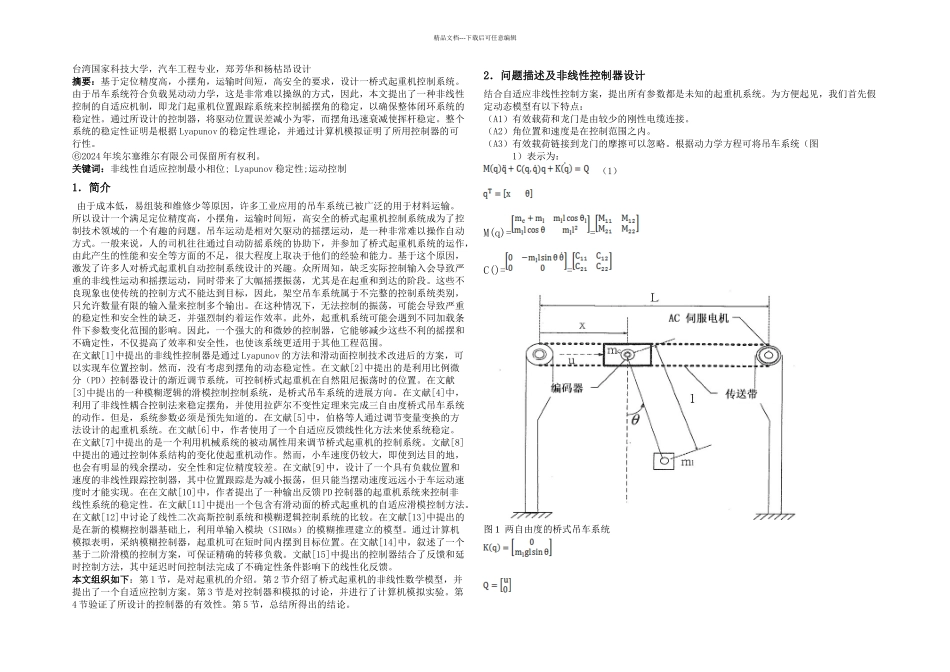
由于吊车系统符合负载晃动动力学,这是非常难以操纵的方式,因此,本文提出了一种非线性控制的自适应机制,即龙门起重机位置跟踪系统来控制摇摆角的稳定,以确保整体闭环系统的稳定性
通过所设计的控制器,将驱动位置误差减小为零,而摆角迅速衰减使挥杆稳定
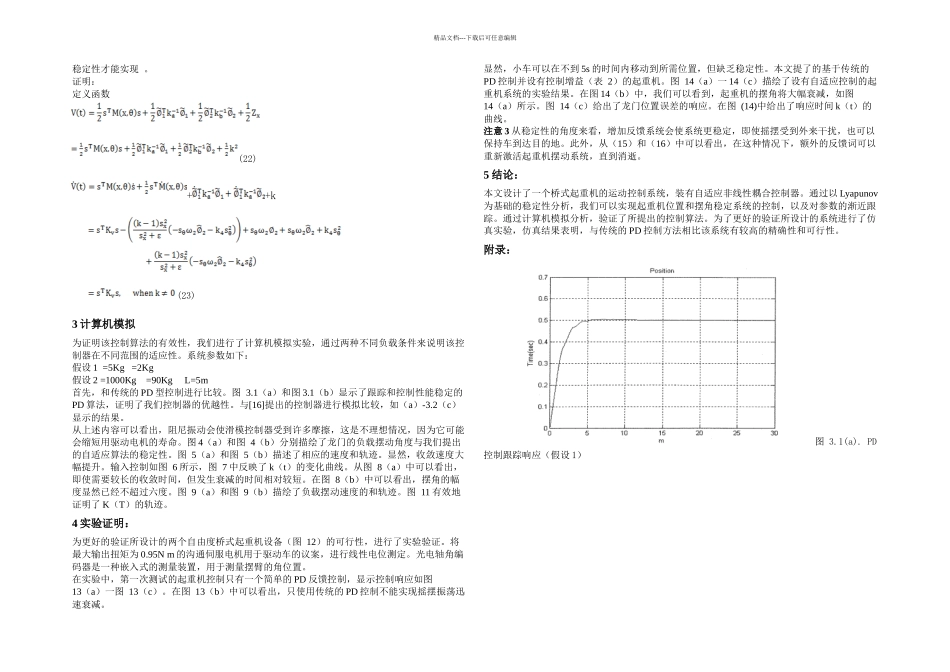
整个系统的稳定性证明是根据 Lyapunov 的稳定性理论,并通过计算机模拟证明了所用控制器的可行性
⑥2024 年埃尔塞维尔有限公司保留所有权利
关键词:非线性自适应控制最小相位; Lyapunov 稳定性;运动控制1.简介 由于成本低,易组装和维修少等原因,许多工业应用的吊车系统已被广泛的用于材料运输
所以设计一个满足定位精度高,小摆角,运输时间短,高安全的桥式起重机控制系统成为了控制技术领域的一个有趣的问题
吊车运动是相对欠驱动的摇摆运动,是一种非常难以操作自动方式
一般来说,人的司机往往通过自动防摇系统的协助下,并参加了桥式起重机系统的运作,由此产生的性能和安全等方面的不足,很大程度上取决于他们的经验和能力
基于这个原因,激发了许多人对桥式起重机自动控制系统设计的兴趣
众所周知,缺乏实际控制输入会导致严重的非线性运动和摇摆运动,同时带来了大幅摇摆振荡,尤其是在起重和到达的阶段
这些不良现象也使传统的控制方式不能达到目标,因此,架空吊车系统属于不完整的控制系统类别,只允许数量有限的输入量来控制多个输出
在这种情况下,无法控制的振荡,可能会导致严重的稳定性和安全性的缺乏,并强烈制约着运作效率
此外,起重机系统可能会遇到不同加载条件下参数变化范围的影响
因此,一个强大的和微妙的控制器,它能够减少这些不利的摇摆和不确定性,不仅提高了效率和安全性,也使该系统更适用于其他工程范围