精品文档---下载后可任意编辑4-1 负反馈系统的开环传递函数,试绘制闭环系统的根轨迹
解:根轨迹有 3 个分支,分别起始于 0,-1,-2,终止于无穷远
实轴上的根轨迹是(-∞,-2]及[-1,0]
d(s3+3 s2+2s)ds=0可得,,;是分离点
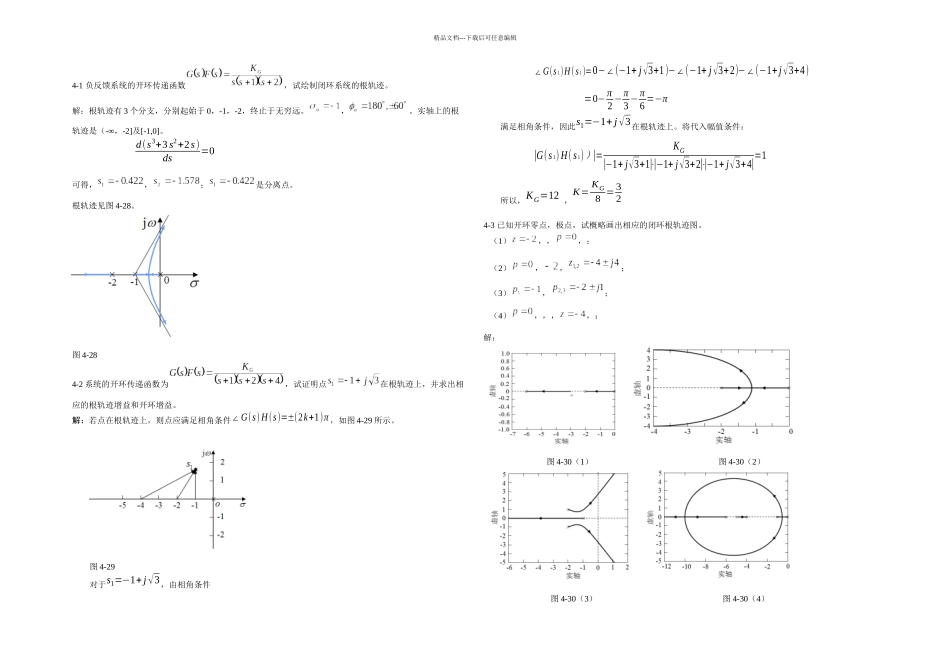
根轨迹见图 4-28
图 4-284-2 系统的开环传递函数为,试证明点在根轨迹上,并求出相应的根轨迹增益和开环增益
解:若点在根轨迹上,则点应满足相角条件∠G(s)H(s)=±(2k+1)π ,如图 4-29 所示
图 4-29对于s1=−1+ j√3,由相角条件∠G(s 1)H(s 1)=0−∠(−1+ j√3+1)−∠(−1+ j√3+2)−∠(−1+j√3+4)=0−π2 −π3 −π6 =−π满足相角条件,因此s1=−1+ j√3在根轨迹上
将代入幅值条件:|G(s 1)H(s 1))|=KG|−1+ j√3+1|⋅|−1+ j√3+2|⋅|−1+ j√3+4|=1所以,KG=12 ,K= KG8 = 324-3 已知开环零点,极点,试概略画出相应的闭环根轨迹图
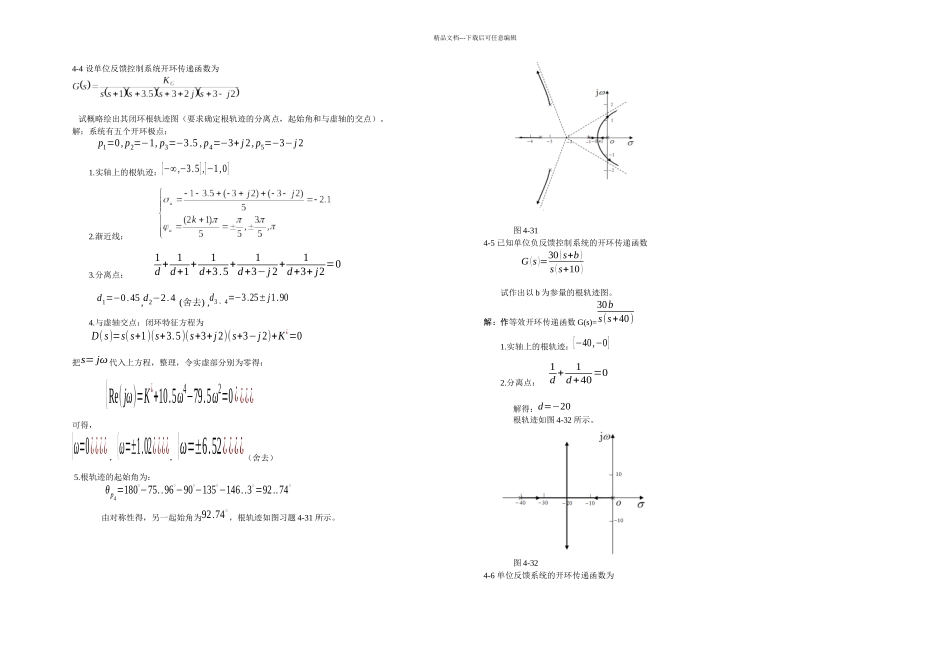
(1),,,; (2),,; (3),; (4),,,,;解:图 4-30(1) 图 4-30(2)图 4-30(3) 图 4-30(4)精品文档---下载后可任意编辑4-4 设单位反馈控制系统开环传递函数为 试概略绘出其闭环根轨迹图(要求确定根轨迹的分离点,起始角和与虚轴的交点)
解:系统有五个开环极点:p1=0, p2=−1, p3=−3
5 , p4=−3+ j 2, p5=−3−j 21
实轴上的根轨迹:[−∞,−3
5] ,[−1,0]2
渐近线: 3
分离点: 1d + 1d+1+1d+3
5+1d+3−j 2+1d+3+ j2=0d1=−0
45,d2−2
4 (舍去) ,d3、4=−3
25± j1
与虚轴交点:闭环特征方程