1 动 态 系 统 建 模 仿 真 实 验 报 告 ( 2) 四旋翼飞行器仿真 姓 名 : 学 号 : 指导教师 : 院 系 : 2014
28 2 1 实验内容 基于Simulink 建立四旋翼飞行器的悬停控制回路,实现飞行器的悬停控制; 建立GUI 界面,能够输入参数并绘制运动轨迹; 基于VR Toolbox建立3D 动画场景,能够模拟飞行器的运动轨迹
2 实验目的 通过在 Matlab 环境中对四旋翼飞行器进行系统建模,使掌握以下内容: 四旋翼飞行器的建模和控制方法 在 Matlab 下快速建立虚拟可视化环境的方法
3 实验器材 硬件:PC 机
工具软件:操作系统:Windows 系列;软件工具:MATLAB 及 simulink
4 实验原理 4
1 四旋翼飞行器 四旋翼飞行器通过四个螺旋桨产生的升力实现飞行, 原理与直升机类似
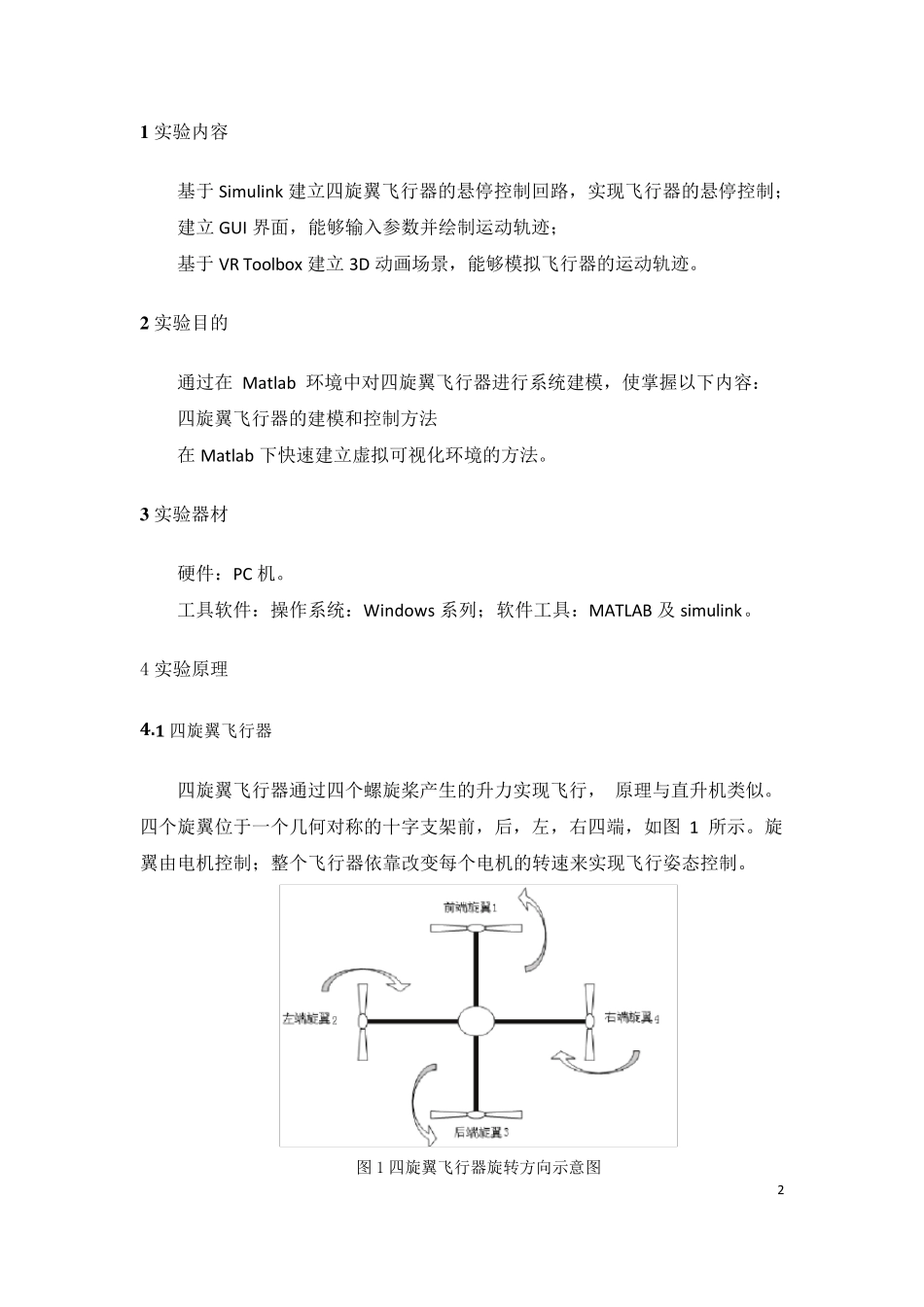
四个旋翼位于一个几何对称的十字支架前,后,左,右四端,如图 1 所示
旋翼由电机控制;整个飞行器依靠改变每个电机的转速来实现飞行姿态控制
图 1 四旋翼飞行器旋转方向示意图 3 在图 1 中, 前端旋翼 1 和后端旋翼 3 逆时针旋转, 而左端旋翼 2 和右端的旋翼 4 顺时针旋转, 以平衡旋翼旋转所产生的反扭转矩
由此可知, 悬停时, 四只旋翼的转速应该相等,以相互抵消反扭力矩;同时等量地增大或减小四只旋翼的转速,会引起上升或下降运动;增大某一只旋翼的转速,同时等量地减小同组另一只旋翼的转速,则产生俯仰、横滚运动;增大某一组旋翼的转速,同时等量减小另一组旋翼的转速,将产生偏航运动
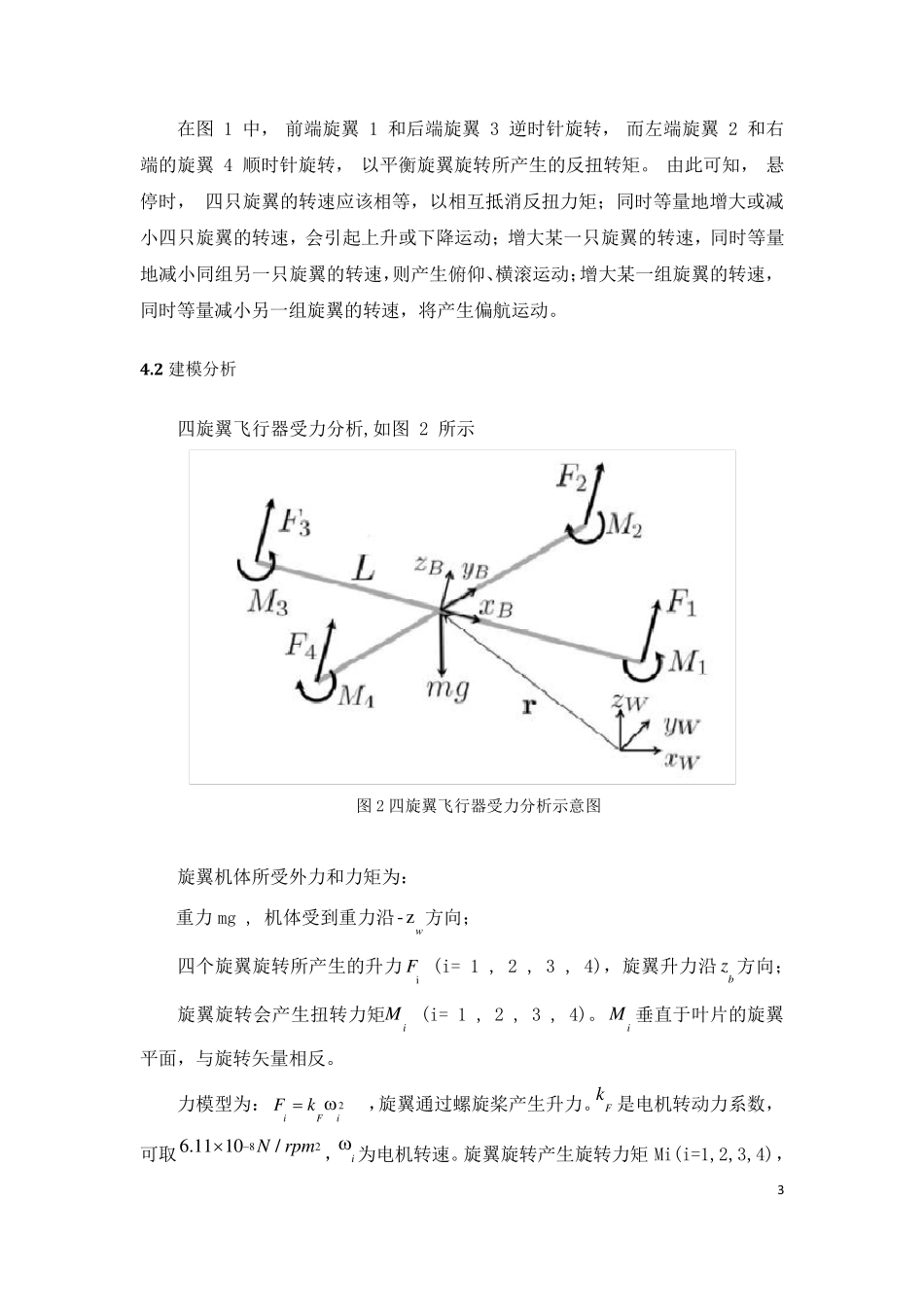
2 建模分析 四旋翼飞行器受力分析,如图 2 所示 图2 四旋翼飞行器受力分析示意图 旋翼机体所受外力和力矩为: 重力mg , 机体受到重力沿wz-方向; 四个旋翼旋转所产生的升力iF (i= 1 , 2 , 3 , 4),旋翼升力沿b